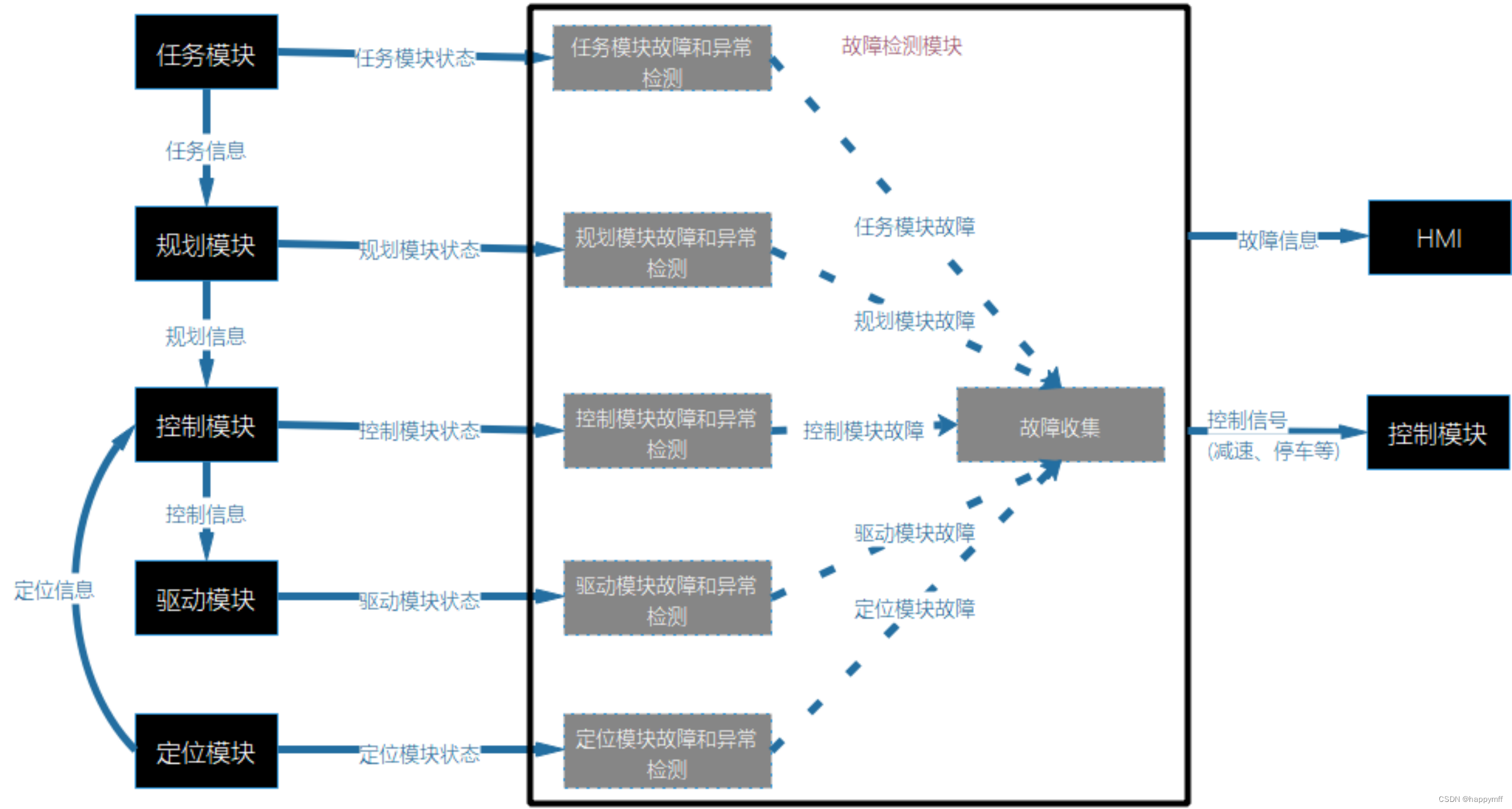
本文主要是介绍故障诊断模块的设计,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
如何做故障诊断模块的测试呢?
1.组装消息输入
2.进入消息topic的发布
3.查看诊断模块的输出
#!/usr/bin/env python
# -*- encoding: utf-8 -*-
'''
@文件 :control_topic.py
@说明 :
@时间 :2022/03/01 10:24:44
@作者 :mff
@版本 :1.0
'''from diagnose_msgs.msg import ModuleStates, ModuleState
from diagnose_msgs.msg import ControlLimit
from diagnose_msgs.msg import SpeedLimit
from diagnose_msgs.msg import EmcLimit
from diagnose_msgs.msg import Float64Map, Int32Map, BoolMapimport rospy#定时函数
def count_time(start_time, duration):duration1 = rospy.Time.now() - start_timeif duration1 > duration:return Truereturn Falsedef test_4801():topic_name = "/SY01/planning/diagnose_states"pub = rospy.Publisher(topic_name, ModuleStates, queue_size=1000)hz = rospy.Rate(10)msgs = ModuleStates()msg = ModuleState()msg.module_type="planning_module"msg.sub_module_type="sub_planning"msg.sub_module_id = "1"map_status = Int32Map()map_status.key = "map_load_status"map_status.value = -1start=rospy.Time.now()duration = rospy.Duration(3)while not rospy.is_shutdown():msg.int_states = []if count_time(start, duration):start = rospy.Time.now()if map_status.value == -1:map_status.value = 0else:map_status.value = -1msgs = ModuleStates()msg.int_states.append(map_status)msg.head.stamp = rospy.Time.now()msgs.states.append(msg)pub.publish(msgs)hz.sleep()def test_4802():topic_name = "/SY01/planning/diagnose_states"pub = rospy.Publisher(topic_name, ModuleStates, queue_size=1000)hz = rospy.Rate(1)msgs = ModuleStates()msg = ModuleState()msg.module_type="planning_module"msg.sub_module_type="sub_planning"msg.sub_module_id = "1"map_status = Int32Map()map_status.key = "resolution_status"map_status.value = -1start=rospy.Time.now()duration = rospy.Duration(3)while not rospy.is_shutdown():msg.int_states = []if count_time(start, duration):start = rospy.Time.now()if map_status.value == -1:map_status.value = 0else:map_status.value = -1msgs = ModuleStates()msg.int_states.append(map_status)msg.head.stamp = rospy.Time.now()msgs.states.append(msg)pub.publish(msgs)hz.sleep()if __name__ == "__main__":rospy.init_node("planning")test_4801()# test_4802()这篇关于故障诊断模块的设计的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




