本文主要是介绍仪表运放直流误差源计算指南,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 概述
仪表放大器的直流和噪声规格与常规运算放大器略有不同;
绝对值激光晶圆调整技术允许用户通过这一个电阻对增益进行精确编程。该电阻的绝对精度和温度系数直接影响着仪表放大器的增益精度和漂移。由于外部电阻不可能精确匹配内部薄膜电阻的温度系数,因此,应选择一个低温度系数TC (< 25 ppm/°C)金属薄膜电阻,其精度最好为0.1%或以上。
许多仪表放大器的额定增益范围一般为1至1000或者1至10000。因此,在较高增益下也能正常工作,但制造商并不保证能在这些高增益下实现特定性能水平。
实践中,随着增益设置电阻变小,因金属走线和焊线电阻导致的误差将变大。这些误差再加上噪声和漂移的增加,结果可能使较高单级增益失去实用价值。
另外,当反映到高增益输出时,输入失调电压可能变得很大。例如,对于增益为10000的输出,0.5 mV的输入失调电压将变成5 V。
对于高增益,最佳做法是用一个仪表放大器作为前置放大器,然后用一个后置放大器进一步放大。
2 增益误差和增益非线性度
增益误差规格为与增益方程的最大偏差。该高品质仪表放大器的最大误差为0.02%(G = 1)和0.15%(G = 1000)。
注意,增益误差随着增益的增加而加大。尽管外部连接的增益网络允许用户精确设置增益,但外部电阻的温度系数以及网络中各电阻之间的温差都会加大整体增益误差。 如果数据最终进行数字化处理并呈现给数字处理器,则可通过测量已知基准电压并乘以一个常数,来更正增益误差。
增益非线性度指相对于输出与输入关系坐标图中一条直线的最大偏差。高品质仪表放大器的增益非线性度一般为0.01% (100 ppm)或以下,而且对推荐增益范围内的增益相对不太敏感。
3 输入失调电压与偏置电流误差
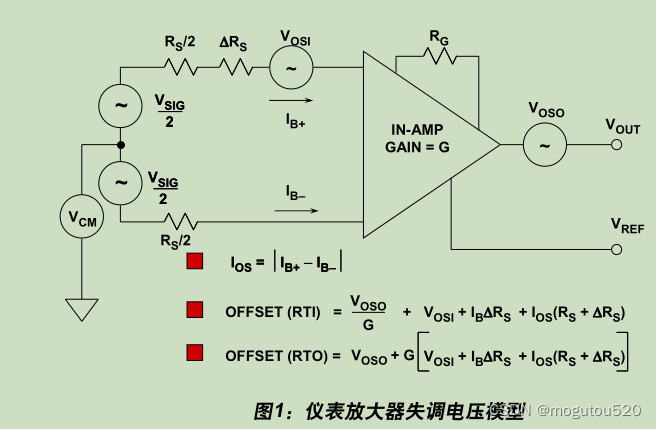
仪表放大器的总输入失调电压由两部分组成(见下图1)。输入失调电压V OSI 是由增益G反映到仪表放大器输出端的输入失调组分。输出失调电压V OSO 则是独立于增益的。
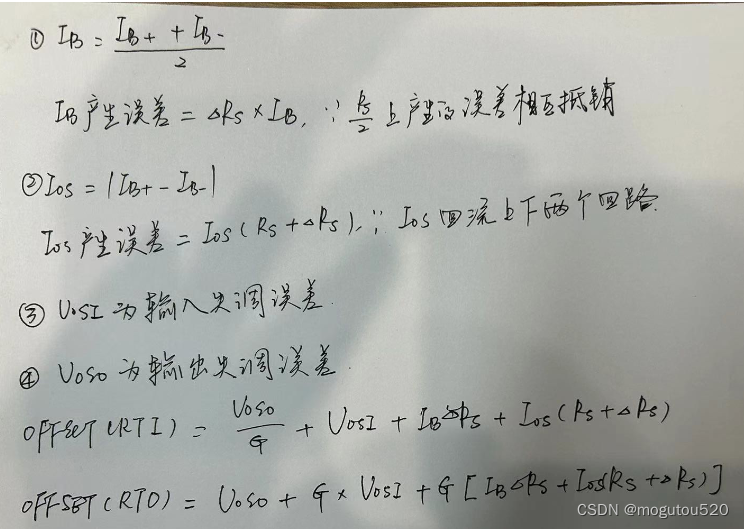
详细推导过程
在低增益情况下,输出失调电压占据主导地位;在高增益下,输入失调电压较为显著。输出失调电压漂移通常在G = 1时测得(此时,输入效应并不显著),输入失调电压漂移则是在高增益下测得的漂移规格(此时,输出失调效应可忽略不计)。
折合到输入端(RTI)的总输出失调误差等于VOSI + VOSO/G。仪表放大器数据手册可能会分别规定VOSI和VOSO ,或者给出不同增益值的总RTI输入失调电压。
4 共模抑制与电源抑制误差
仪表放大器共模误差同时为增益和频率的函数。
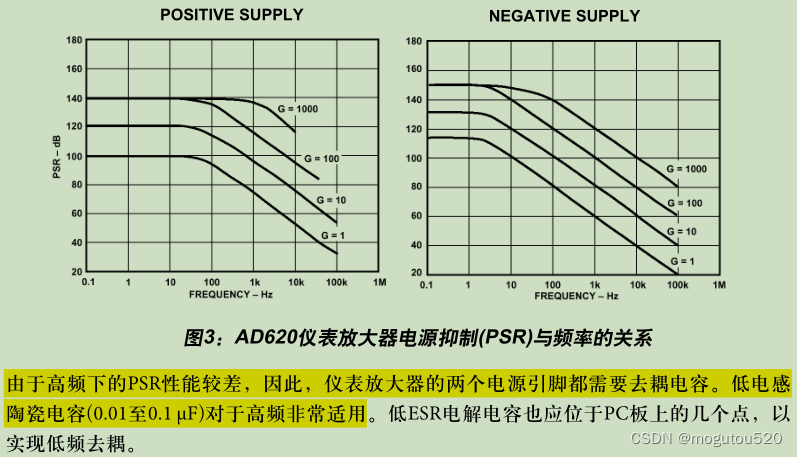
5 电源抑制(PSR)
同样为增益和频率的函数
6 总误差计算
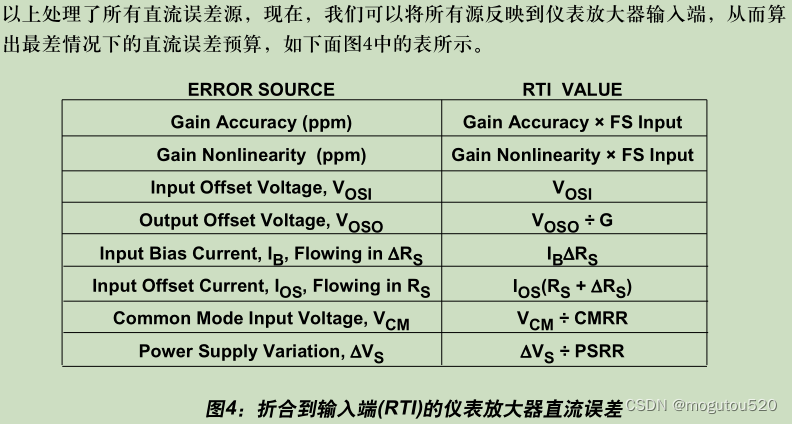
所有误差均折合到输入端计算
增益误差和增益非线性误差定义的都是输入满量程的百分比
7 计算实例
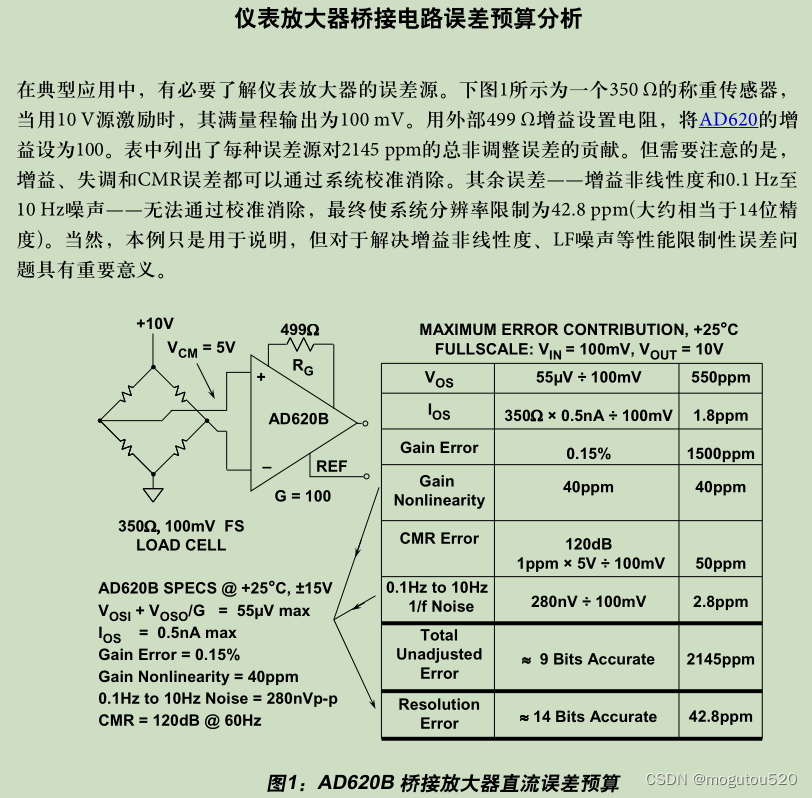
- 增益误差=增益误差系数 * 输入信号 = 0.15% * 100mv
增益非线性误差 = 增益非线性误差系数 * 输入信号 = 40ppm * 100mv
都是以输入信号大小作为衡量
- Total UnadjustedError = VOS + IOS + Gain Error + Gain Nonlinearity + CMR Error + 1/f噪声
= 550ppm +1.8ppm +1500ppm +40ppm +50ppm + 2.8ppm
= 2144.6ppm
- Resolution Error = Gain Nonlinearity + 1/f噪声
= 40ppm + 2.8ppm
说明:VOS 、 IOS、 Gain Error、CMR Error等误差可通过数字信号处理器校准掉1/f噪声算低频
这篇关于仪表运放直流误差源计算指南的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





