本文主要是介绍(第20章)LinuxC本质中多目标文件的链接、静态库、共享库、虚拟内存管理,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 一、多目标文件的链接
- 1.将<用堆栈实现倒序打印>的代码拆成两个程序文件
- (1)编译
- (2)用 nm 命令查看目标文件的符号表:nm 目标文件
- (3)查看可执行文件的符号表:readelf -a 可执行文件
- (3)实际上链接的过程是由一个链接脚本(Linker Script) 控制的:默认链接脚本:ld --verbose
- 二、定义和申明
- 1.为什么编译器在处理函数调用代码时需要有函数原型?
- 前提:只有两个文件:main.c以及stack.c文件
- (1)gcc的-wall选项可以看到不加函数声明的错误
- (2)隐式声明靠不住,修改<用堆栈实现倒序打印>
- (3)外链接extern修饰函数声明的用法及作用
- (4)内链接static修饰函数声明的用法及作用
- (5)外链接extern修饰变量声明的用法及作用
- 函数声明的 extern 可写可不写,而变量声明如果不写 extern 意思就完全变了
- (6)内链接static修饰变量声明的用法及作用
- 2.头文件:将上面的main.c中的函数声明写在了stack.h中
- (1)头文件的作用
- (2)include角括号和引号的区别
- (a)tree查看代码文件树和#include预处理指示中可以使用相对路径
- (b)预处理指示 #ifndef STACK_H #endif有什么用?
- (c)为什么需要防止重复包含?
- (d)重复包含头文件会有如下问题
- (e)为什么要包含头文件而不是 .c 文件?
- 3.定义和声明的详细规则
- (1)关键字对函数声明的作用
- (2)关键字对变量声明的作用
- 四、静态库
- (2)编译以及打包成静态库XXX.a
- gcc -L -l(小) -I(大)
- (3)链接共享库和静态链接库有什么区别?
- 五、共享库
- 1. 编译、链接、运行
- (1)gcc -c -fPIC xx.c xxx.c文件和gcc -c xx.c xxx.c生成的目标文件有什么不同?
- 目标文件一般称为重定位文件
- (iiii)那么运行时在哪些路径下找共享库呢?用ldd 可执行文件
- (iiiii)解决共享库not fund问题的四种方法
- 2.动态链接过程
- 共享库的特点
- 3.共享库的命名惯例
- (1)系统的共享库通常带有符号链接,其link name在编译链接时使用
- 动态库的优点
- 六、虚拟内存管理
- (1)通过进程id,查看其虚拟地址空间
- (2)进程地址空间
- (3)虚拟内存管理MMU起到了什么作用呢?
- (4)为啥进程地址空间是独立的?注:共享库的加载地址是运行时决定的!
一、多目标文件的链接
1.将<用堆栈实现倒序打印>的代码拆成两个程序文件
- stack.c 实现堆栈,main.c 使用堆栈
- 解释:这段程序和原来有点不同,在<LinuxC语言中栈、队列、DFS、BFS,循环队列>中 top 总是指向栈顶元素的下一个元素,而在这段程序中 top 总是指向栈顶元素,所以要初始化成-1才表示空堆栈,这两种堆栈使用习惯都很常见
- a 和 b 这两个变量没有用,只是为了顺便说明链接过程才加上的
/* stack.c */
char stack[512];
int top = -1;
void push(char c)
{stack[++top] = c;
}char pop(void)
{return stack[top--];
}
int is_empty(void)
{return top == -1;
}/* main.c */
#include <stdio.h>
int a, b = 1;
int main(void)
{push('a');push('b');push('c');while(!is_empty())putchar(pop());putchar('\n');return 0;
}
(1)编译

(2)用 nm 命令查看目标文件的符号表:nm 目标文件

(3)查看可执行文件的符号表:readelf -a 可执行文件
- 执行readelf -a main

(3)实际上链接的过程是由一个链接脚本(Linker Script) 控制的:默认链接脚本:ld --verbose


二、定义和申明
1.为什么编译器在处理函数调用代码时需要有函数原型?
前提:只有两个文件:main.c以及stack.c文件
(1)gcc的-wall选项可以看到不加函数声明的错误

(2)隐式声明靠不住,修改<用堆栈实现倒序打印>


(3)外链接extern修饰函数声明的用法及作用
- 在这里只有两个文件:main.c以及stack.c文件,而main.c想要用stack.c中的函数,就得这样写;

(4)内链接static修饰函数声明的用法及作用

(5)外链接extern修饰变量声明的用法及作用

- 以上函数和变量声明也可以写在 main 函数体里面,使所声明的标识符具有块作用域:
函数声明的 extern 可写可不写,而变量声明如果不写 extern 意思就完全变了

(6)内链接static修饰变量声明的用法及作用

2.头文件:将上面的main.c中的函数声明写在了stack.h中
(1)头文件的作用
- 重复的代码总是应该尽量避免的,可以自己写一个头文件 stack.h :
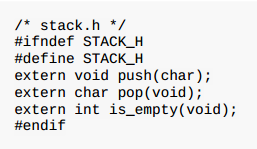
- 这样在 main.c 中只需包含这个头文件就可以了,而不需要写三个函数声明:

(2)include角括号和引号的区别
- 角括号: gcc 首先查找 -I选项指定的目录,然后查找系统的头文件目录(通常是 /usr/include ,在我的系统上还包括 /usr/lib/gcc/i486-linux-gnu/4.3.2/include )
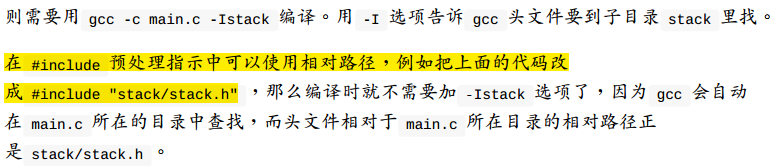
- 引号: gcc 首先查找包含头文件的 .c 文件所在的目录,然后查找 -I 选项指定的目录,然后查找系统的头文件目录
(a)tree查看代码文件树和#include预处理指示中可以使用相对路径

(b)预处理指示 #ifndef STACK_H #endif有什么用?

(c)为什么需要防止重复包含?


(d)重复包含头文件会有如下问题

(e)为什么要包含头文件而不是 .c 文件?



3.定义和声明的详细规则
(1)关键字对函数声明的作用

(2)关键字对变量声明的作用


四、静态库
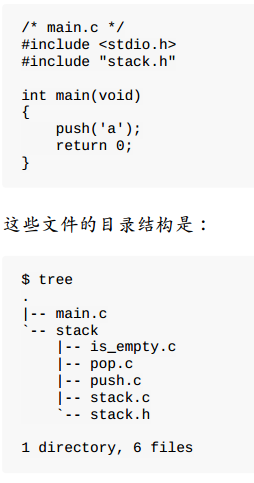
(1)我们继续用 stack.c 的例子。为了便于理解,我们把 stack.c 拆成四个程序文件(虽然实际上没太大必要) ,把 main.c 改得简单一些,头文件 stack.h 不变,本节用到的代码如下所示:

(2)编译以及打包成静态库XXX.a
- 我们把 stack.c 、 push.c 、 pop.c 、 is_empty.c 编译成目标文件:

- 然后打包成一个静态库 libstack.a :

gcc -L -l(小) -I(大)
- 然后我们把 libstack.a 和 main.c 编译链接在一起

(3)链接共享库和静态链接库有什么区别?

- 反汇编看上一步生成的可执行文件 main :

五、共享库
1. 编译、链接、运行
(1)gcc -c -fPIC xx.c xxx.c文件和gcc -c xx.c xxx.c生成的目标文件有什么不同?
目标文件一般称为重定位文件
- 组成共享库的目标文件和一般的目标文件有所不同,在编译时要加 -fPIC 选项

- 我们知道一般的目标文件称为Relocatable,在链接时可以把目标文件中各段的地址做重定位,重定位时需要修改指令
(a)我们先不加 -fPIC 选项编译生成目标文件:

(i)首先,反汇编查看push.o的目标文件

- 指令中凡是用到 stack 和 top 的地址都用0x0表示,准备在重定位时修改;
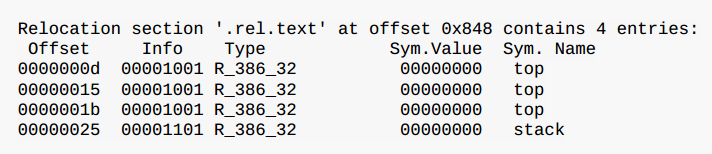
(ii)再看 readelf 输出的 .rel.text 段的信息,标出了指令中有四处需要在重定位时修改:
(iii)下面编译链接成可执行文件之后再做反汇编分析:

(b)现在看用 -fPIC 编译生成的目标文件有什么不同
(i) - 指令中用到的 stack 和 top 的地址不再以0x0表示,而是以 0x0(%ebx) 表示 但其中还是留有0x0准备做进一步修改。

(ii)再看 readelf 输出的 .rel.text 段

(iii)我们先编译生成共享库再做反汇编分析:



(iiii)那么运行时在哪些路径下找共享库呢?用ldd 可执行文件


- 总之,共享库的搜索路径由动态链接器决定,从 ld.so(8) 的Man Page可以查到共享库路径的搜索顺序:


(iiiii)解决共享库not fund问题的四种方法
方法1(不推荐):

方法2(最常用):ldconfig


- 现在再用 ldd 命令查看, libstack.so 就能找到了:

方法3:

方法4(不推荐):gcc的选项:-Wl,-rpath

2.动态链接过程
(1)研究一下在 main.c 中调用共享库的函数 push 是如何实现的
- 首先反汇编看一下 main 的指令:

- 和 “静态库”链接静态库不同, push 函数没有链接到可执行文件中。而且 call 80483d8 push@plt;这条指令调用的也不是 push 函数的地址;
共享库的特点
-
共享库是位置无关代码,在运行时可以加载到任意地址,其加载地址只有在动态链接时才能确定, 所以在 main 函数中不可能直接通过绝对地址调用 push 函数,也是通过间接寻址来找 push 函数的。
-
对照着上面的指令,我们用 gdb 跟踪一下:



3.共享库的命名惯例
(1)系统的共享库通常带有符号链接,其link name在编译链接时使用

- 按照共享库的命名惯例,每个共享库有三个文件名:real name、soname和linker name,真正的库文件(而不是符号链接) 的名字是real name,包含完整的共享库版本号。例如上面的 libcap.so.1.10 、 libc-2.8.90.so 等。
动态库的优点
- soname是一个符号链接的名字

- linker name仅在编译链接时使用,gcc 的 -L 选项应该指定linker name所在的目录。
有的linker name是库文件的一个符号链接,有的linker name是一段链接脚本,
例如上面的 libc.so 就是一个linker name,它是一段链接脚本:

- 下面重新编译我们的 libstack ,指定它的soname:


六、虚拟内存管理
(1)通过进程id,查看其虚拟地址空间
- 我们知道操作系统利用体系结构提供的VA到PA的转换机制实现虚拟内存管理
- eg如下:

解释说明如下: - 用 ps 命令查看当前终端下的进程,得知 bash 进程的id是29977,然后用 cat /proc/29977/maps 命令查看它的虚拟地址空间
- /proc 目录中的文件并不是真正的磁盘文件,而是由内核虚拟出来的文件系统
- 当前系统中运行的每个进程在 /proc 下都有一个子目录,目录名就是进程的id, 查看目录下的文件可以得到该进程的相关信息
(2)进程地址空间
- x86平台的虚拟地址空间是0x0000 0000~0xffff ffff,大致上前3GB(0x0000 0000~0xbfff ffff) 是用户空间,后1GB(0xc000 0000~0xffff ffff) 是内核空间
- /lib/ld-2.8.90.so 就是动态链接器 /lib/ld-linux.so.2 ,后者是前者的符号链接。标有 [vdso] 的地址范围是 linux-gate.so.1 的映射空间,我们讲过这个共享库是由内核虚拟出来的

(3)虚拟内存管理MMU起到了什么作用呢?

(4)为啥进程地址空间是独立的?注:共享库的加载地址是运行时决定的!




这篇关于(第20章)LinuxC本质中多目标文件的链接、静态库、共享库、虚拟内存管理的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








