本文主要是介绍船舶固定安装设备测量方法--自由移站法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
更多咨询请见xiaok海洋测绘网
多波束以及剖面仪等固定安装设备的测量是一个比较麻烦的事。
以前单位的科考船都比较小,都是我们自己测量,都是采用
传统的测量方法:先做导线控制,然后进行碎步测量,控制点的
精度能控制但是碎步测量的点精度无法控制。
以前听多波束厂家技术员讲,有一种专门测量船舶的方法,可以
采用自由设站法,我在知网上搜索了一下,找到了一篇:
潘国荣等《船舶测量自由移站法及多站转换参数的整体平差》;
这种东西比较小众。国外有一个小公司专门干这个,他的报告我
也看过,在百度文库上可以搜到
Alignment_Falkor_OSAE_Overath_Rev1_04012012;
就是采用这种方法。
这次单位安装EM122,测量打包给厂家了,估计他们会请这个
公司来测量,刚好可以观摩一下。
这种测量方法的难度在于误差方程式的建立,不过潘国荣等在
文章中已经讲方程式列出来了。
以下内容摘自文章,文章可以从csdn下载,我已经上传:
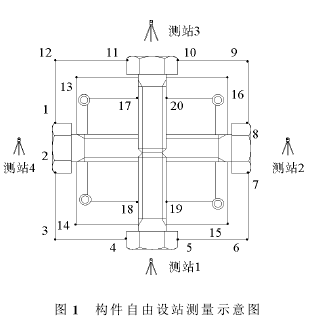
图1中的构件即为船体中一大型构件,有多个待测点,由于船舶分段体
一般比较庞大,在一个测站无法完成构件上所有特征点的测量,
需要多个测站才能完成。根据船舶测量的特点,关键是该分段体的
实际尺寸,需要将多站所测的坐标点转换到同一坐标系下进行计算。
相邻两个测站之间必须有3个或以上公共点便可进行坐标转换
,为了获得坐标间的无缝衔接并提高各站间转换参数的精度
,本文利用首站与末站之间所拥有的公共点,增加约束条件,
可将所有转换参数进行整体平差。
普通测量方法中,每设一站都需要知道该测站点的坐标,后视已知点,
然后观测未知点,工作量繁重,易导致测量人员疲劳,降低测量
精度,增加粗差产生的概率。但船舶测量中最终需要的是构件的相关尺寸,
并不需要知道其绝对坐标,使用自由移站测量方法进行观测可以
有效避免上述测量方法中的问题。观测时,可将测站架设在任位置,
不需要对中,整平后直接观测船体构件上的特征点坐标。
移站后,后一站与前一站至少需要有3个公共点。同样,最后一站
与第一站也需要至少有3个公共点。
这篇关于船舶固定安装设备测量方法--自由移站法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







