本文主要是介绍【蓝桥杯嵌入式】 第六届国赛,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
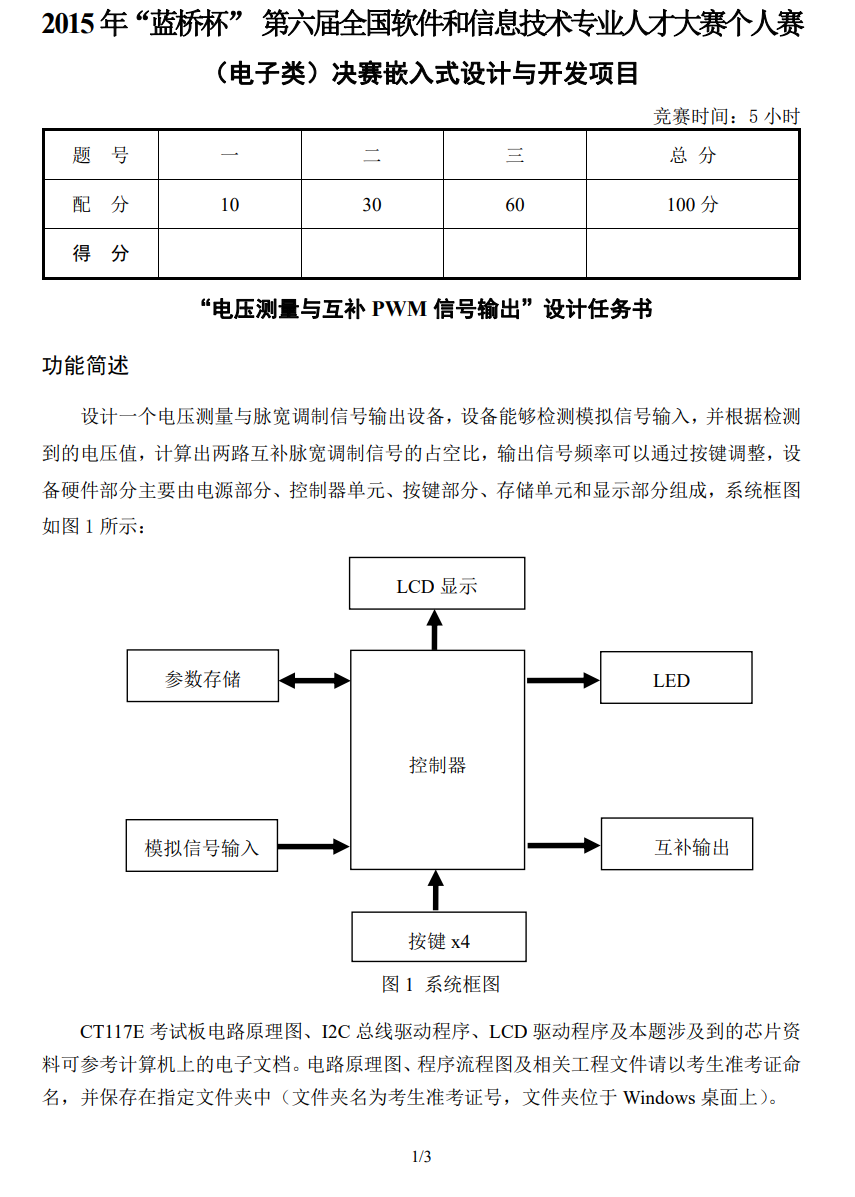
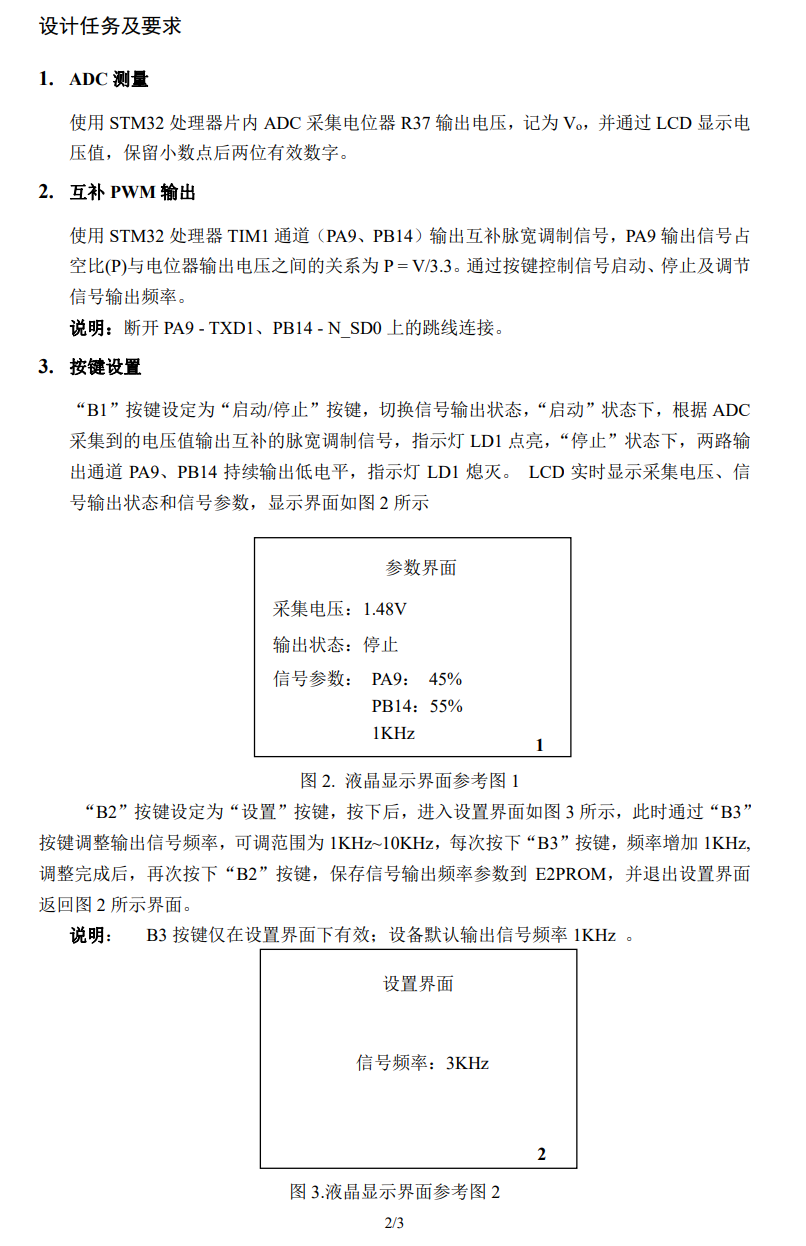
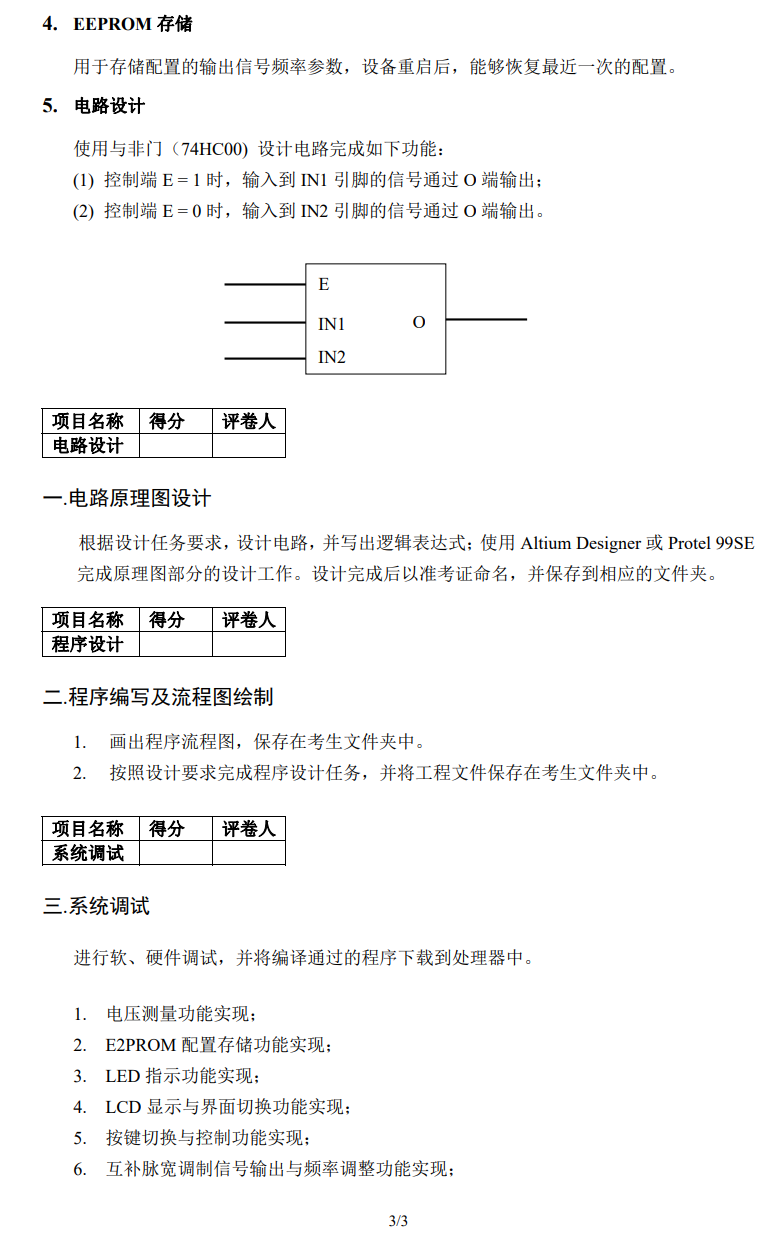
题目
配置
注意事项
代码 - 默写大师
EEPROM读写函数
LED驱动函数
ADC采集
上电初始化
LCD
按键
PWM互补输出
全部代码
hardware.c
hardware.h
control.c
control.h
main.c

题目
配置
注意事项
复制LCD的工程,先配置资源 --- 勾选完选项一定要再看一眼,可能选择错误
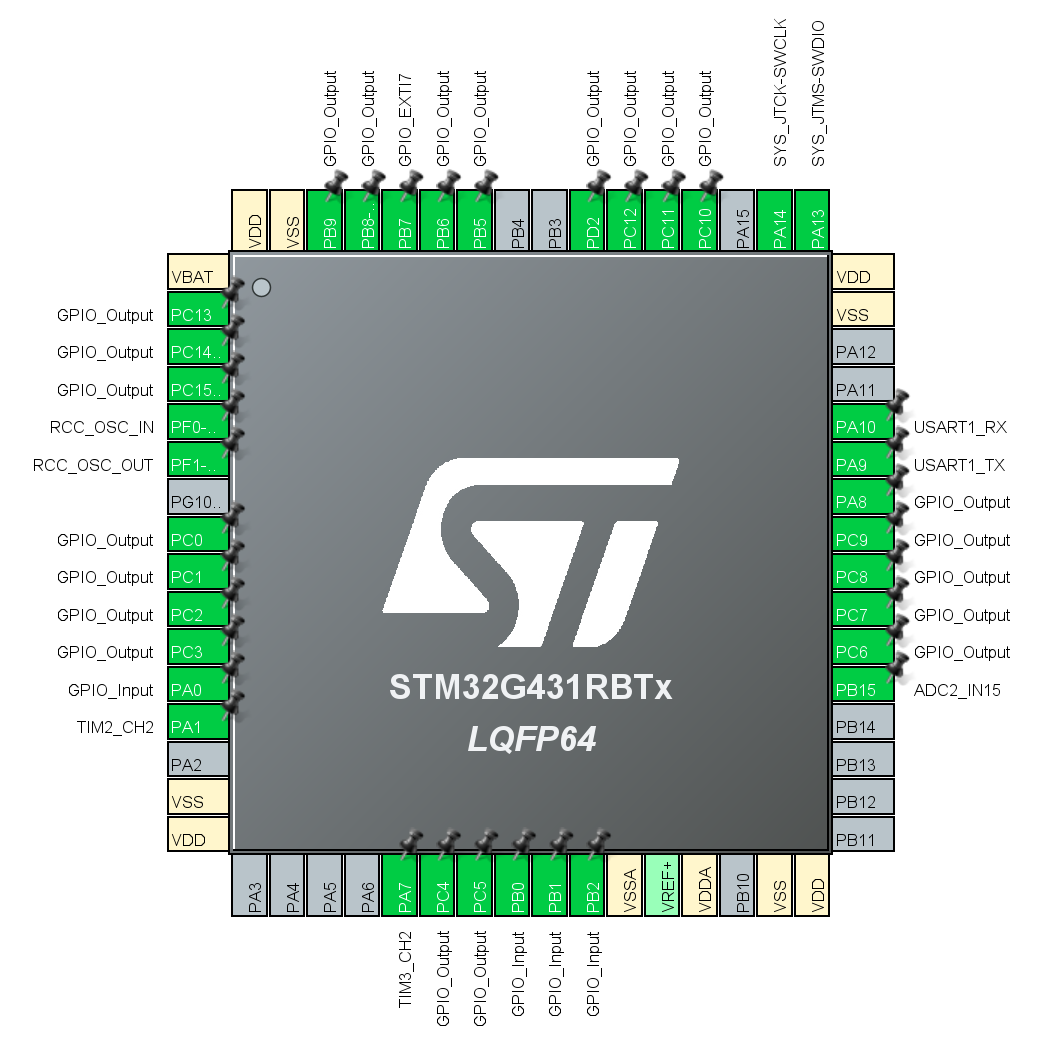
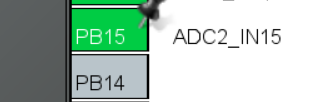
ADC:配置ADC2_IN15,对应PB15引脚
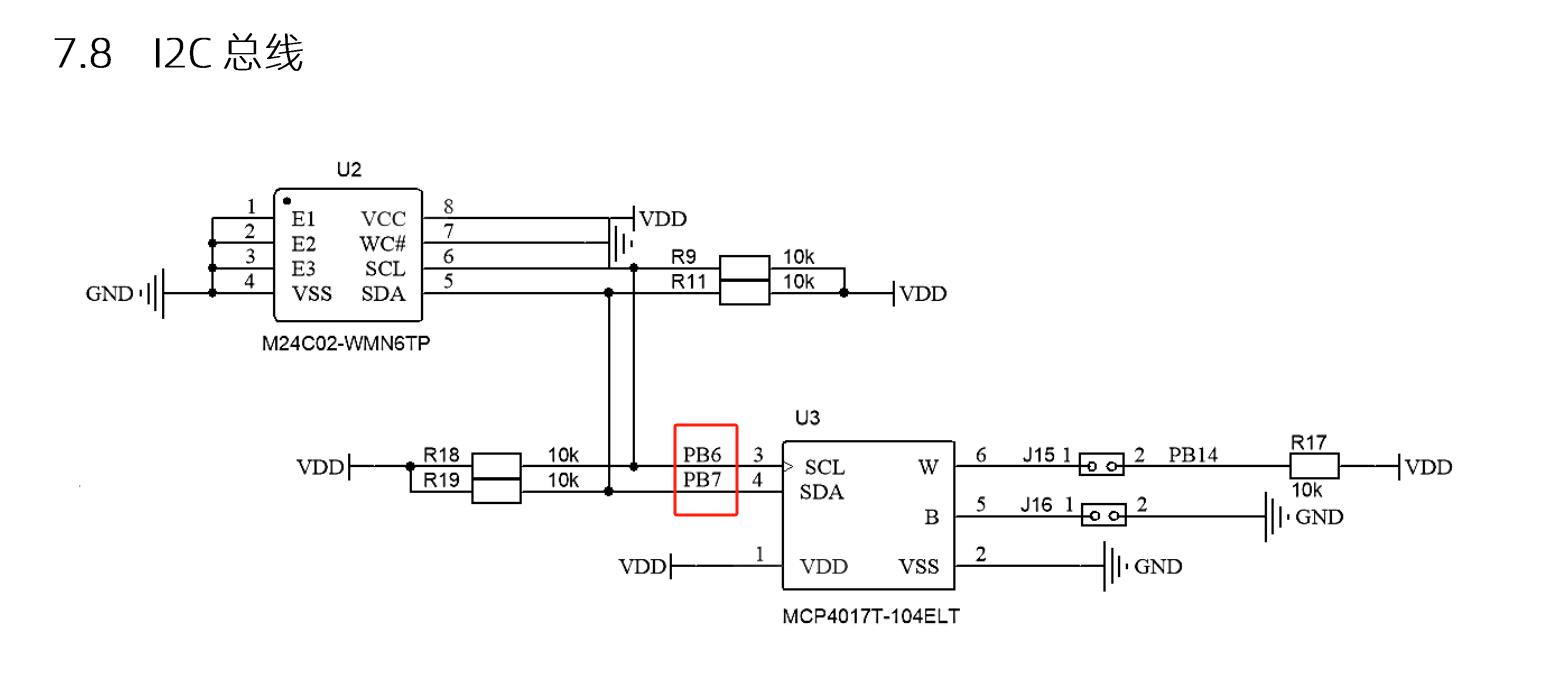
EEROM,配置PB6和PB7

按键 输入模式PB0、PB1、PB2、PA0
LED 一定要使能PD2
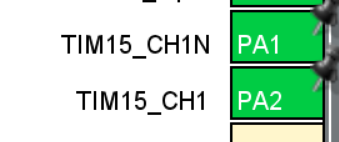
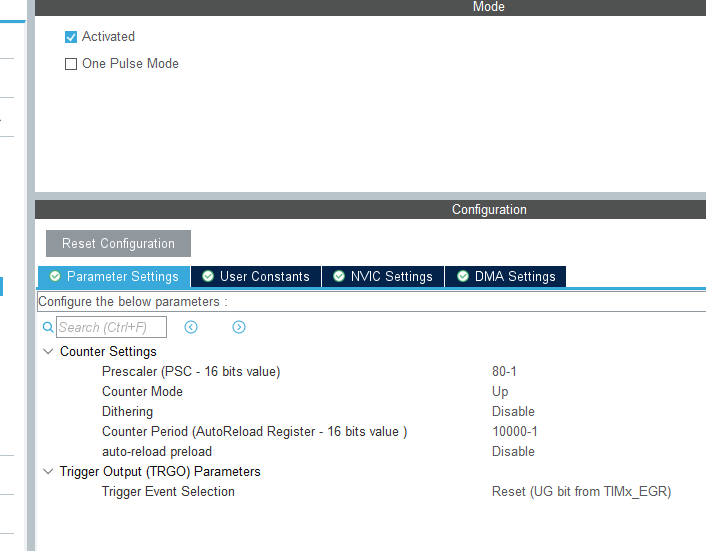
PWM互补输出,用TIM15

TIM6 - 10ms基准定时器
代码 - 默写大师
先默写几个函数
EEPROM读写函数
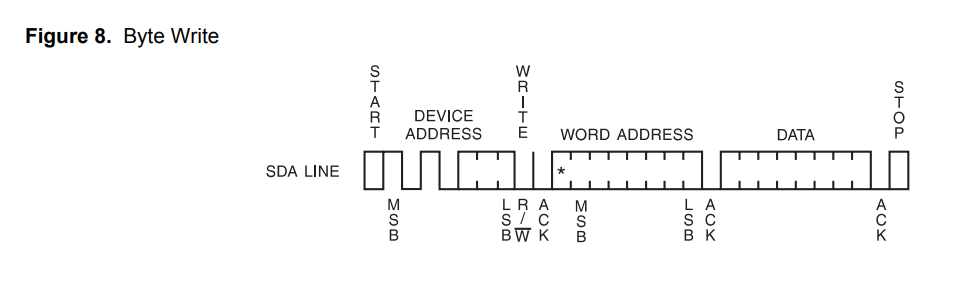
随机地址读函数 - 参考手册的时序

uint8_t EEPROM_ReadByte(uint8_t address)
{uint8_t data;I2CStart();I2CSendByte(0xA0); // address + writeI2CWaitAck();I2CSendByte(address);I2CWaitAck();I2CStop();I2CStart();I2CSendByte(0xA1); // address + readI2CWaitAck();data = I2CReceiveByte();I2CSendNotAck();I2CStop();return data;
}
void EEPROM_WriteByte(uint8_t address, uint8_t data)
{I2CStart();I2CSendByte(0xA0);I2CWaitAck();I2CSendByte(address);I2CWaitAck();I2CSendByte(data);I2CWaitAck();I2CStop();
}定义几个结构体
//-----------------------
void power_init(void);
void LCD_Disp(void);
void Key_Proc(void);
void ADC_Proc(void);
void PWM_Proc(void);//-----------------------
struct Tick{uint32_t lcd;uint32_t key;uint32_t adc;uint32_t pwm;
};
extern struct Tick tick;struct Flag{bool PWM_Mode;uint8_t LCD_View;
};
extern struct Flag flag;struct Param{double ADC;uint16_t PWM_Frq; //频率uint8_t PWM_Duty_PA9;uint8_t PWM_Duty_PA14;
};
extern struct Param param;//定义变量
struct Tick tick;
struct Flag flag;
struct Param param;
struct Keys key;LED驱动函数
void LED_Disp(uint8_t state)
{HAL_GPIO_WritePin(GPIOC, 0xFF00, GPIO_PIN_SET); //0ffHAL_GPIO_WritePin(GPIOC, state << 8, GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}ADC采集
double Get_ADC(ADC_HandleTypeDef *hadc)
{uint32_t adc;HAL_ADC_Start(hadc);adc = HAL_ADC_GetValue(hadc);return adc*3.3/4040; //这里应该是adc*3.3/4096
}
double Get_ADC(ADC_HandleTypeDef *hadc)
{uint32_t adc;HAL_ADC_Start(hadc);adc = Hal_ADC_GetValue(hadc);return adc*3.3/4040;
}返回值应该是adc*3.3/4096,但是这里我改成了return adc*3.3/4040; 补偿电压采集的数据,范围是0~3.30V
void ADC_Proc(void)
{if (uwTick - tick.adc < 250)return;tick.adc = uwTick;param.ADC = Get_ADC(&hadc2);
}上电初始化
void power_init(void)
{LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);LED_Disp(0x00); //0ffI2CInit();if (EEPROM_ReadByte(0x55) != 0x11) //第一次上电{param.PWM_Frq = 1000; //初始化参数EEPROM_WriteByte(0x55, 0x11);HAL_Delay(10);EEPROM_WriteByte(0x01, 1);HAL_Delay(10);}else{param.PWM_Frq = EEPROM_ReadByte(0x01)*1000;}
}LCD
封装LCD显示函数,使用可变参数列表
#include "stdio.h"
#include "string.h"
#include "stdarg.h"void LCD_Printf(uint8_t linex, char *format, ...)
{char lcd_show_text[30];memset(lcd_show_text, '\0', sizeof(lcd_show_text));va_list arg;va_start(arg, format);vsprintf(lcd_show_text, format, arg);LCD_DisplayStringLine(linex, (uint8_t *)lcd_show_text);va_end(arg);
}LCD界面
void LCD_Disp(void)
{if (uwTick - tick.lcd < 200)return;tick.lcd = uwTick;if (flag.LCD_View == 0){LCD_Printf(Line0, " Para");LCD_Printf(Line2, " ADC_V:%.2fV ", param.ADC);LCD_Printf(Line4, " State:%s ", (flag.PWM_Mode) ? "start" : "stop" ); //三目运算符LCD_Printf(Line6, " Siginal:PA9: %2d%% ", (flag.PWM_Mode) ? (param.PWM_Duty_PA9) : 0);LCD_Printf(Line7, " PB14:%2d%% ", (flag.PWM_Mode) ? (param.PWM_Duty_PA14) :0);LCD_Printf(Line8, " %dKHz ", param.PWM_Frq/1000);LCD_Printf(Line9, " 1"); }else if (flag.LCD_View == 1){LCD_Printf(Line1, " Setting");LCD_Printf(Line5, " Signal_Frq:%dKHz ", param.PWM_Frq/1000);LCD_Printf(Line9, " 2");}
}按键
按键扫描
void Key_Read(void)
{if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0) == 0)key.value = 1;else if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1) == 0)key.value = 2;else if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2) == 0)key.value = 3;else if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == 0)key.value = 4;elsekey.value = 0;key.down = key.value & (key.value ^ key.old);key.up = ~key.value & (key.value ^ key.old);key.old = key.value;
}按键处理函数
void Key_Proc(void)
{if (uwTick - tick.key < 10) //10msreturn;tick.key = uwTick;Key_Read();if (key.down == 1) //“B1”按键设定为“启动/停止”按键{flag.PWM_Mode = !flag.PWM_Mode;}if (key.down == 2){//先判断是否存入E2PROMif (flag.LCD_View == 1){//eepromEEPROM_WriteByte(0x01, param.PWM_Frq/1000); //存整数部分HAL_Delay(10);}// 再刷新界面flag.LCD_View ++;if (flag.LCD_View == 2) flag.LCD_View = 0;LCD_Clear(Black); }if (key.down == 3){if (flag.LCD_View == 1){param.PWM_Frq += 1000;if (param.PWM_Frq > 10000) param.PWM_Frq = 1000;}}
}PWM互补输出
PWM配置的定时器,给的80-1预分频,那计数值就是80M/80 = 1M
频率设置:TIMx->ARR = 1e6/频率
占空比设置:TIMx->CCRx = (1e6/频率)*占空比
我代码里的占空比只保留整数部分,所以我的CCR赋值时候最后除以100。
void PWM_Proc(void)
{if (uwTick - tick.pwm < 100)return;tick.pwm = uwTick;//计算占空比param.PWM_Duty_PA9 = (uint8_t)(param.ADC*100.0/3.3);param.PWM_Duty_PA14 = 100-param.PWM_Duty_PA9;TIM15->ARR = 1e6 / param.PWM_Frq; //计算频率if (flag.PWM_Mode == 0) //stop{ //关闭PWM输出LED_Disp(0);HAL_TIM_PWM_Stop(&htim15, TIM_CHANNEL_1);HAL_TIMEx_PWMN_Stop(&htim15, TIM_CHANNEL_1);}else{LED_Disp(0x01);TIM15 -> CCR1 = (TIM15->ARR + 1) * param.PWM_Duty_PA9 / 100;HAL_TIM_PWM_Start(&htim15, TIM_CHANNEL_1);HAL_TIMEx_PWMN_Start(&htim15, TIM_CHANNEL_1);}
}
互补PWM的函数
//PWM开启
HAL_TIM_PWM_Start(&htim15, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim15, TIM_CHANNEL_1);
//PWM关闭
HAL_TIM_PWM_Stop(&htim15, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htim15, TIM_CHANNEL_1);全部代码
hardware.c
#include "hardware.h"struct Keys key;void LED_Disp(uint8_t state)
{HAL_GPIO_WritePin(GPIOC, 0xFF00, GPIO_PIN_SET); //0ffHAL_GPIO_WritePin(GPIOC, state << 8, GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}void Key_Read(void)
{if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0) == 0)key.value = 1;else if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1) == 0)key.value = 2;else if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2) == 0)key.value = 3;else if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == 0)key.value = 4;elsekey.value = 0;key.down = key.value & (key.value ^ key.old);key.up = ~key.value & (key.value ^ key.old);key.old = key.value;
}double Get_ADC(ADC_HandleTypeDef *hadc)
{uint32_t adc;HAL_ADC_Start(hadc);adc = HAL_ADC_GetValue(hadc);return adc*3.3/4040;
}
hardware.h
#ifndef __HARDWARE_H
#define __HARDWARE_H#include "stm32g4xx_hal.h"void LED_Disp(uint8_t state);
void Key_Read(void);
double Get_ADC(ADC_HandleTypeDef *hadc);struct Keys{uint8_t value;uint8_t old;uint8_t down;uint8_t up;
};
extern struct Keys key;#endif
control.c
#include "control.h"//定义变量
struct Tick tick;
struct Flag flag;
struct Param param;void power_init(void)
{LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);LED_Disp(0x00); //0ffI2CInit();if (EEPROM_ReadByte(0x55) != 0x11) //第一次上电{param.PWM_Frq = 1000; //初始化参数EEPROM_WriteByte(0x55, 0x11);HAL_Delay(10);EEPROM_WriteByte(0x01, 1);HAL_Delay(10);}else{param.PWM_Frq = EEPROM_ReadByte(0x01)*1000;}
}void LCD_Disp(void)
{if (uwTick - tick.lcd < 200)return;tick.lcd = uwTick;if (flag.LCD_View == 0){LCD_Printf(Line0, " Para");LCD_Printf(Line2, " ADC_V:%.2fV ", param.ADC);LCD_Printf(Line4, " State:%s ", (flag.PWM_Mode) ? "start" : "stop" ); //三目运算符LCD_Printf(Line6, " Siginal:PA9: %2d%% ", (flag.PWM_Mode) ? (param.PWM_Duty_PA9) : 0);LCD_Printf(Line7, " PB14:%2d%% ", (flag.PWM_Mode) ? (param.PWM_Duty_PA14) :0);LCD_Printf(Line8, " %dKHz ", param.PWM_Frq/1000);LCD_Printf(Line9, " 1"); }else if (flag.LCD_View == 1){LCD_Printf(Line1, " Setting");LCD_Printf(Line5, " Signal_Frq:%dKHz ", param.PWM_Frq/1000);LCD_Printf(Line9, " 2");}
}void Key_Proc(void)
{if (uwTick - tick.key < 10) //10msreturn;tick.key = uwTick;Key_Read();if (key.down == 1) //“B1”按键设定为“启动/停止”按键{flag.PWM_Mode = !flag.PWM_Mode;}if (key.down == 2){//先判断是否存入E2PROMif (flag.LCD_View == 1){//eepromEEPROM_WriteByte(0x01, param.PWM_Frq/1000); //存整数部分HAL_Delay(10);}// 再刷新界面flag.LCD_View ++;if (flag.LCD_View == 2) flag.LCD_View = 0;LCD_Clear(Black); }if (key.down == 3){if (flag.LCD_View == 1){param.PWM_Frq += 1000;if (param.PWM_Frq > 10000) param.PWM_Frq = 1000;}}
}void ADC_Proc(void)
{if (uwTick - tick.adc < 250)return;tick.adc = uwTick;param.ADC = Get_ADC(&hadc2);
}void PWM_Proc(void)
{if (uwTick - tick.pwm < 100)return;tick.pwm = uwTick;//计算占空比param.PWM_Duty_PA9 = (uint8_t)(param.ADC*100.0/3.3);param.PWM_Duty_PA14 = 100-param.PWM_Duty_PA9;TIM15->ARR = 1e6 / param.PWM_Frq; //计算频率if (flag.PWM_Mode == 0) //stop{ //关闭PWM输出LED_Disp(0);HAL_TIM_PWM_Stop(&htim15, TIM_CHANNEL_1);HAL_TIMEx_PWMN_Stop(&htim15, TIM_CHANNEL_1);}else{LED_Disp(0x01);TIM15 -> CCR1 = (TIM15->ARR + 1) * param.PWM_Duty_PA9 / 100;HAL_TIM_PWM_Start(&htim15, TIM_CHANNEL_1);HAL_TIMEx_PWMN_Start(&htim15, TIM_CHANNEL_1);}
}control.h
#ifndef __CONTROL_H
#define __CONTROL_H#include "stm32g4xx_hal.h"
#include "string.h"
#include "stdio.h"
#include "stdbool.h"#include "hardware.h"
#include "i2c_hal.h"
#include "tim.h"
#include "adc.h"
#include "lcd.h"//-----------------------
void power_init(void);
void LCD_Disp(void);
void Key_Proc(void);
void ADC_Proc(void);
void PWM_Proc(void);//-----------------------
struct Tick{uint32_t lcd;uint32_t key;uint32_t adc;uint32_t pwm;};
extern struct Tick tick;struct Flag{bool PWM_Mode;uint8_t LCD_View;};
extern struct Flag flag;struct Param{double ADC;uint16_t PWM_Frq; //频率uint8_t PWM_Duty_PA9;uint8_t PWM_Duty_PA14;};
extern struct Param param;
//-----------------------#endifmain.c
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "tim.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */#include "control.h"/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM6_Init();MX_ADC2_Init();MX_TIM15_Init();/* USER CODE BEGIN 2 */LCD_Init();/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */power_init();while (1){Key_Proc();LCD_Disp();ADC_Proc();PWM_Proc();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}完结,第六届国赛比较简单,只有PWM互补输出是没有写过的
后续会更新其他届的赛题,同步源码到我的Gitee~
波形展示:具体见B站演示视频
这篇关于【蓝桥杯嵌入式】 第六届国赛的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









