本文主要是介绍TIM(Timer)简介,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
TIM(Timer)定时器介绍
- 定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断
- 16位计数器、预分频器、自动重装寄存器的时基单元,在72MHz计数时钟下可以实现最大59.65s的定时
- 不仅具备基本的定时中断功能,而且还包含内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等多种功能
- 根据复杂度和应用场景分为了高级定时器、通用定时器、基本定时器三种类型
定时器分类
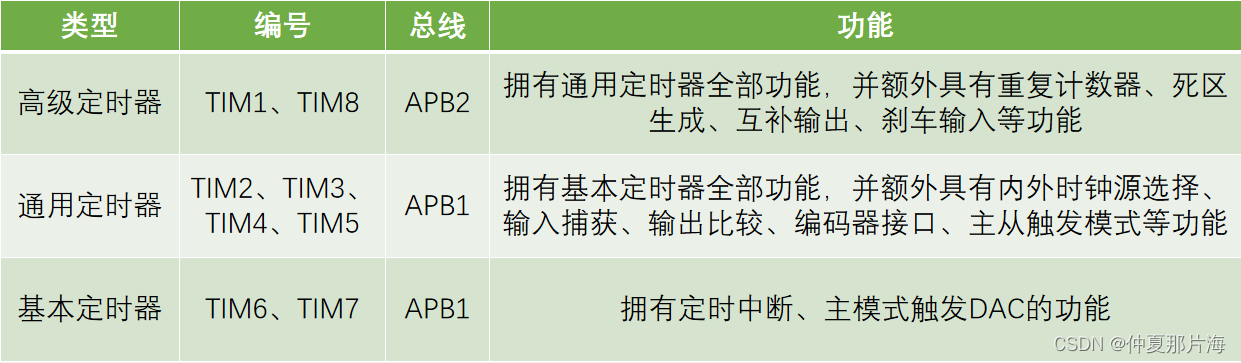
基本定时器
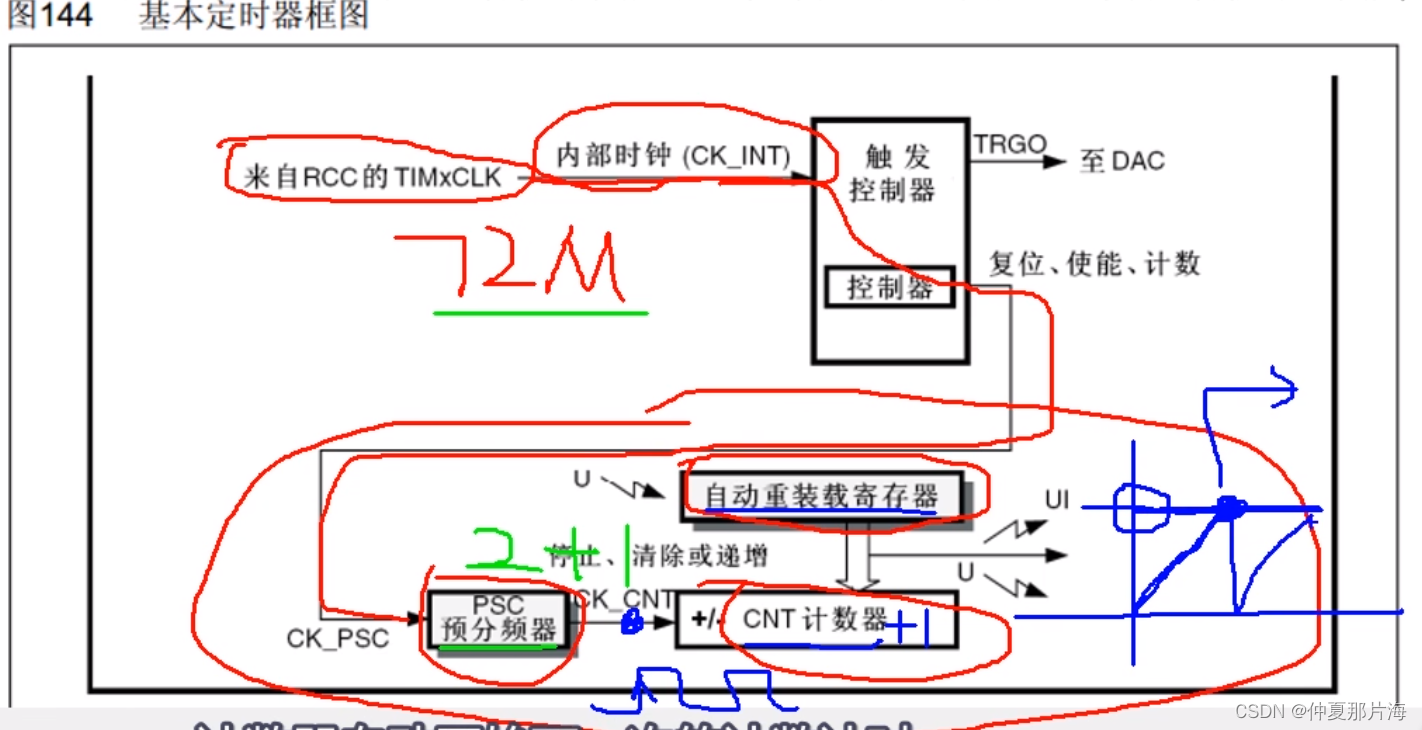
时基单元为下图的预分频器、计数器、自动重装寄存器。
内部时钟CK-INT
预分频器之前连接的是基准计数时钟的输入(由于基本定时器只能选择内部时钟、输入端可以直接认为内部时钟CK-INT、所以通向时基单元的计数频率就是72M)
预分频器
预分频系数实际分频系数=预分频器的值+1(预分频值0:就是不分频72M 、数值1: 就是2分频就是36M)预分频是16位的也就是0X0000~0XFFFF所以最大值是65535,也就是65536分频(预分频器的值+1)
计数器
作用是对输入的预分频后的计数时钟(CK_CNT)进行计数,计数时钟(CK_CNT)每来一个上升沿,计数器值就+1
计数器也是16位的也就是0X0000~0XFFFF所以最大值是65535,如果再加的话计数器就会回到0,当运行到目标值时就会产生UI更新中断或U更新事件
自动重装寄存器
作用就是存储我们写入的计数目标,也是16位的也就是0X0000~0XFFFF所以最大值是65535,到达目标值后就会产生UI更新中断和U更新事件,中断就会通向NIVC,配置好NVIC的定时器通道,定时器的事件信息就能得到CPU的相应了
主从模式触发DAC
用途时使用DAC输出一段波形,那就需要每隔一段时间触发一次DAC,让他输出下一个电压点。中断容易打断主程序运行,所以提供主模式下可以把定时器的U更新事件 映射到触发TRGO(Trigger Out)的位置,TRGO直接接到DAC的触发引脚上。实现了硬件的自动化
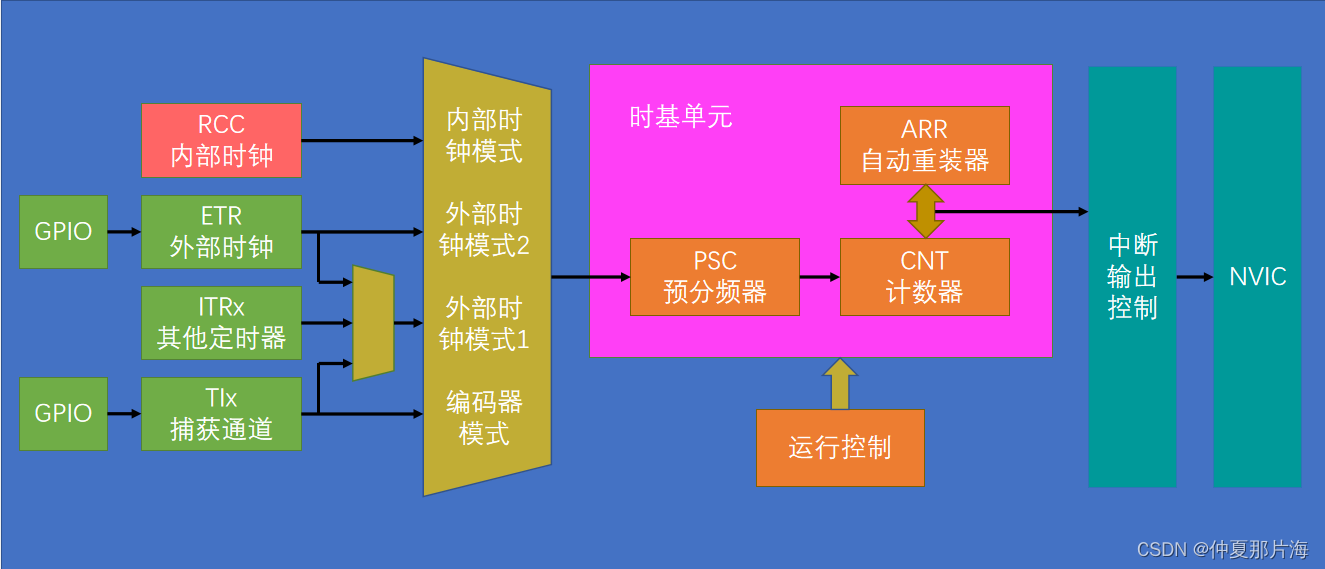
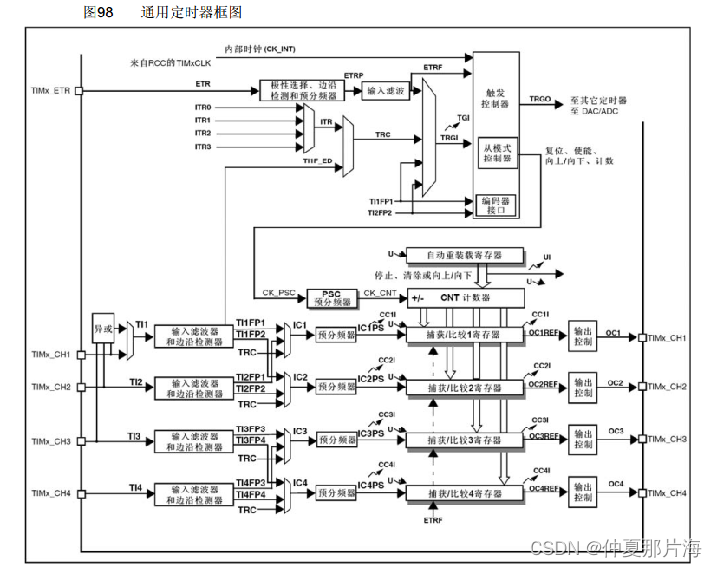
通用定时器
基本定时器只有向上计时的功能。通用定时器和高级定时器有三种计时功能:向上(0到目标值)、向下(目标值到0)、中央对其计时(0到目标值再从目标值到0,完成一次计时就触发一次事件)
基准定时器输入
对于基本定时器只能选择内部时钟也是72MHZ,通用和高级不仅可以使用内部时钟,还可以使用外部时钟TIMx-ETR
外部时钟模式2——外部时钟TIMx-ETR- ETR极性选择…-输入滤波-EFRF-基准时钟选择
外部时钟模式1——TRGI主要是触发输入来使用的
-
ETR
-
ITR0
定时器的级联
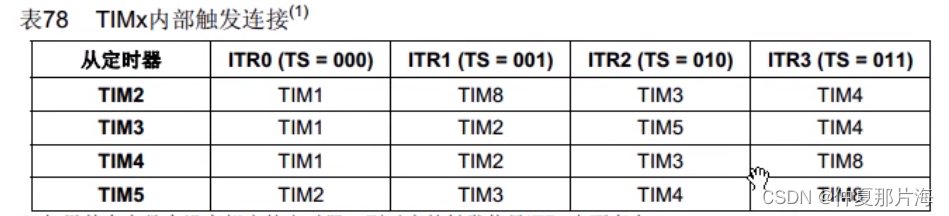
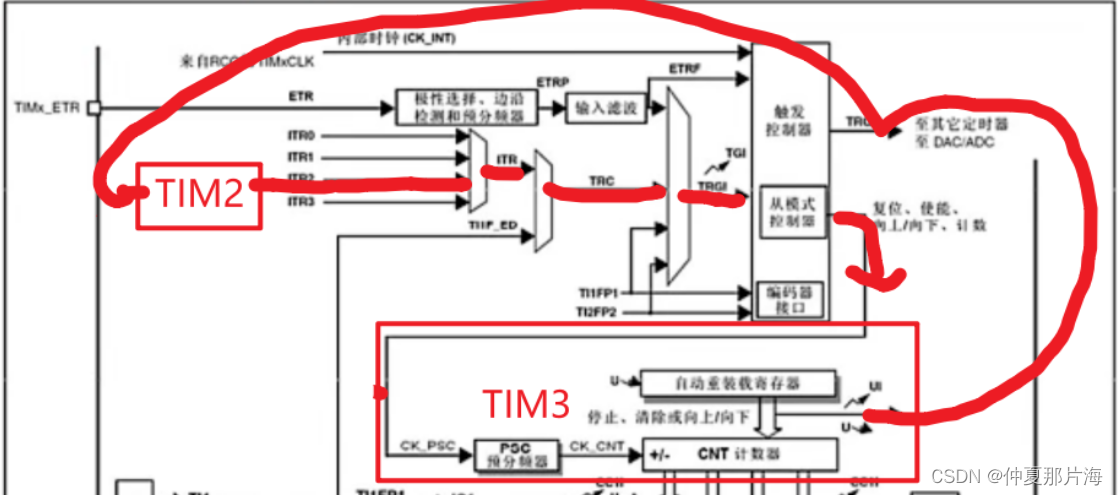
-
TI1FP1、TI2FP2
编码器接口
可以读取正交编码器的输出波形
输出比较电路
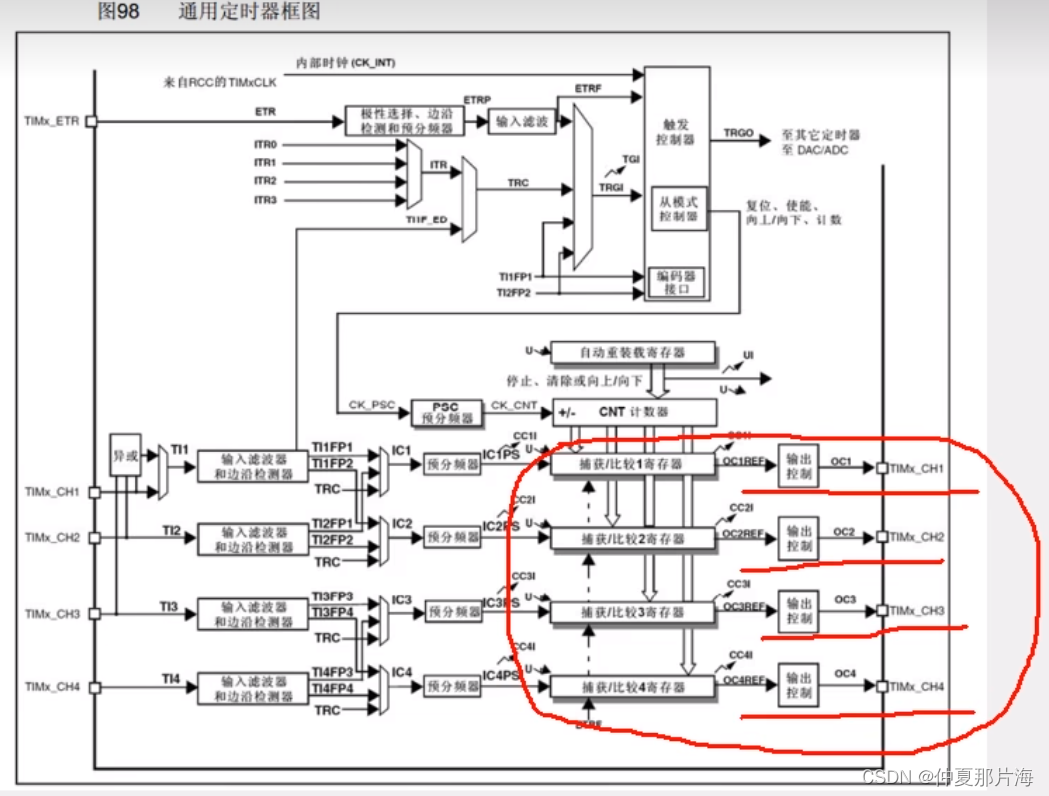
可以用于输出PWM波形,驱动电机。对应四个通道CH1、CH2、CH3、CH4
输入捕获电路
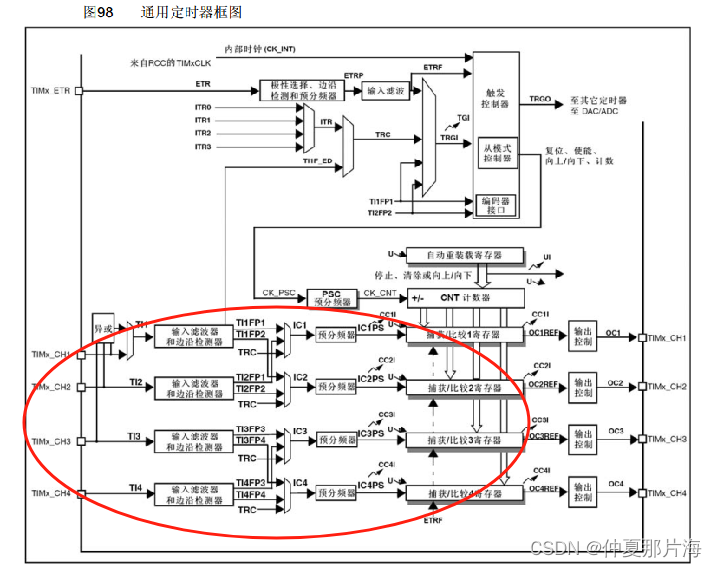
可以用于测量输入方波的频率和占空比。
输入捕获电路也对应四个通道CH1、CH2、CH3、CH4。
捕获/比较寄存器
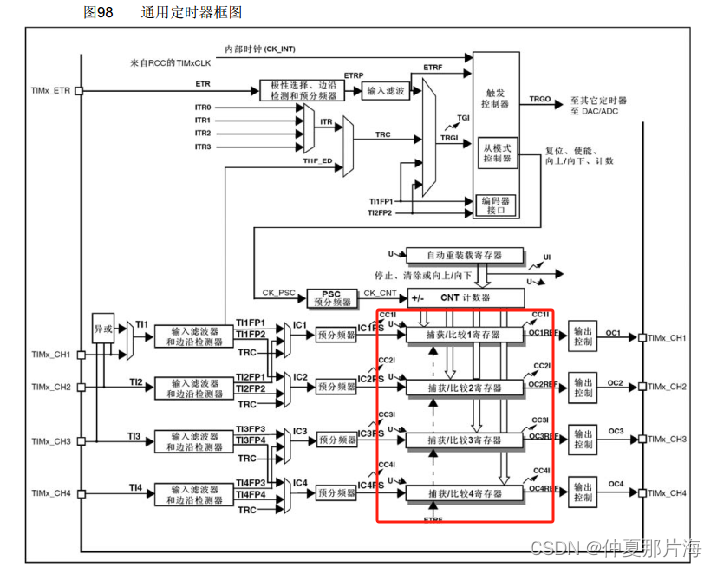
捕获/比较寄存器,是输入和输出比较电路公用的
高级定时器
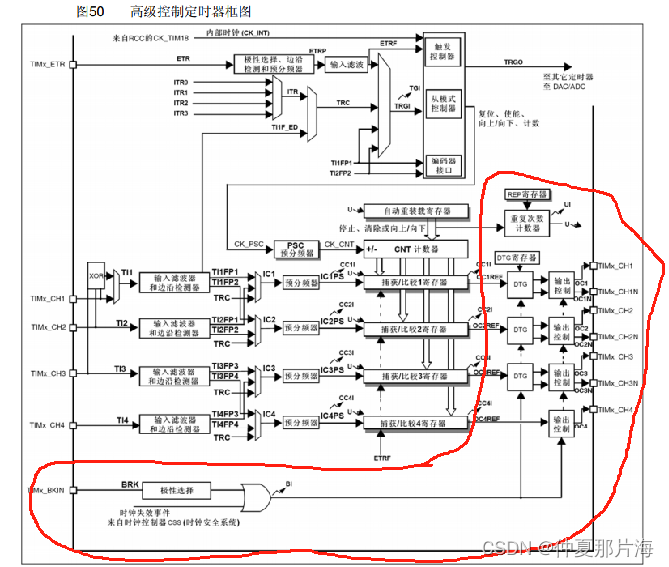
与通用定时器不相同的只有下面部分不一样,
-
申请中断的地方增加了一个重复的计数器
可以实现每隔几个计数周期,才发发生一个更新事件和更新中断事件,原来是每个计数周期都会发生更新
-
高级定时器对输出比较模块的升级(前三路互补波形,第四路CH4没什么变化)
DTG(Dead Time Generate)是死区生成电路(避免开关切换的瞬间,由于器件的不理想造成短暂的直通现象,让桥臂的上下管全都关断。防止直通现象),输出引脚由原来的一个,变为了两互补的输出,可以输出一对互补的PWM波。这些电路可以驱动三相无刷电机比较常用。比如四轴飞行器、电动车后轮、电钻等
图左边是产生短暂的直通现象,图右边是桥臂的上下管全都关断 -
刹车输入

给电机驱动提高安全保障。
实例
内部时钟
1、开启RCC时钟,定时器的基准时钟和整个外设的工作时钟就会同时打开了。
2、选择时基单元的时钟源,对于定时中断就选择内部时钟源。TIM_InternalClockConfig(TIM2);
3、时基单元初始化。
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
4、配置输出中断控制,允许更新中断输出到NVIC。
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//清除定时器更新标志位
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启TIM2的更新中断
5、配置NVIC,在NVIC中打开定时器中断通道,并分配一个优先级。
NVIC_Init(&NVIC_InitStructure);
6、允许控制,使能定时器。
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
#include "stm32f10x.h" // Device headervoid Timer_Init(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //打开定时器/*配置时钟源*/TIM_InternalClockConfig(TIM2);//选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟/*时基单元初始化*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1;//计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1;//预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);//将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);/*中断输出配置*/TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除定时器更新标志位//TIM_TimeBaseInit函数末尾,手动产生了更新事件//若不清除此标志位,则开启中断后,会立刻进入一次中断//如果不介意此问题,则不清除此标志位也可 TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启TIM2的更新中断/*NVIC中断分组*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2//即抢占优先级范围:0~3,响应优先级范围:0~3//此分组配置在整个工程中仅需调用一次//若有多个中断,可以把此代码放在main函数内,while循环之前//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置/*NVIC配置*/NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //选择配置NVIC的TIM2线NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //指定NVIC线路的抢占优先级为2NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设/*TIM使能*/TIM_Cmd(TIM2, ENABLE); //启动定时器
}void TIM2_IRQHandler(void)
{if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) //获取中断标志位{TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除标志位}
}外部时钟
0、开启GPIO口,配置GPIO。
1、开启RCC时钟,定时器的基准时钟和整个外设的工作时钟就会同时打开了。
2、选择时基单元的时钟源,对于定时中断就选择内部时钟源。
3、配置时基单元。
4、配置输出中断控制,允许更新中断输出到NVIC。
5、配置NVIC,在NVIC中打开定时器中断通道,并分配一个优先级。
6、允许控制,使能定时器。
(这里是用对射红外线做的,挡光10次,计数器加一)
void Timer_Init(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);//将PA0引脚初始化为上拉输入/*外部时钟配置*/TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0x0F);//选择外部时钟模式2,时钟从TIM_ETR引脚输入//注意TIM2的ETR引脚固定为PA0,无法随意更改//最后一个滤波器参数加到最大0x0F,可滤除时钟信号抖动/*时基单元初始化*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 10 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);//将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元 /*中断输出配置*/TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除定时器更新标志位//TIM_TimeBaseInit函数末尾,手动产生了更新事件//若不清除此标志位,则开启中断后,会立刻进入一次中断//如果不介意此问题,则不清除此标志位也可TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启TIM2的更新中断/*NVIC中断分组*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2//即抢占优先级范围:0~3,响应优先级范围:0~3//此分组配置在整个工程中仅需调用一次//若有多个中断,可以把此代码放在main函数内,while循环之前//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置/*NVIC配置*/NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //选择配置NVIC的TIM2线NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //指定NVIC线路的抢占优先级为2NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1NVIC_Init(&NVIC_InitStructure);//将结构体变量交给NVIC_Init,配置NVIC外设/*TIM使能*/TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}/*** 函 数:返回定时器CNT的值* 参 数:无* 返 回 值:定时器CNT的值,范围:0~65535*/
uint16_t Timer_GetCounter(void)
{return TIM_GetCounter(TIM2); //返回定时器TIM2的CNT
}/* 定时器中断函数,可以复制到使用它的地方
void TIM2_IRQHandler(void)
{if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}
*/
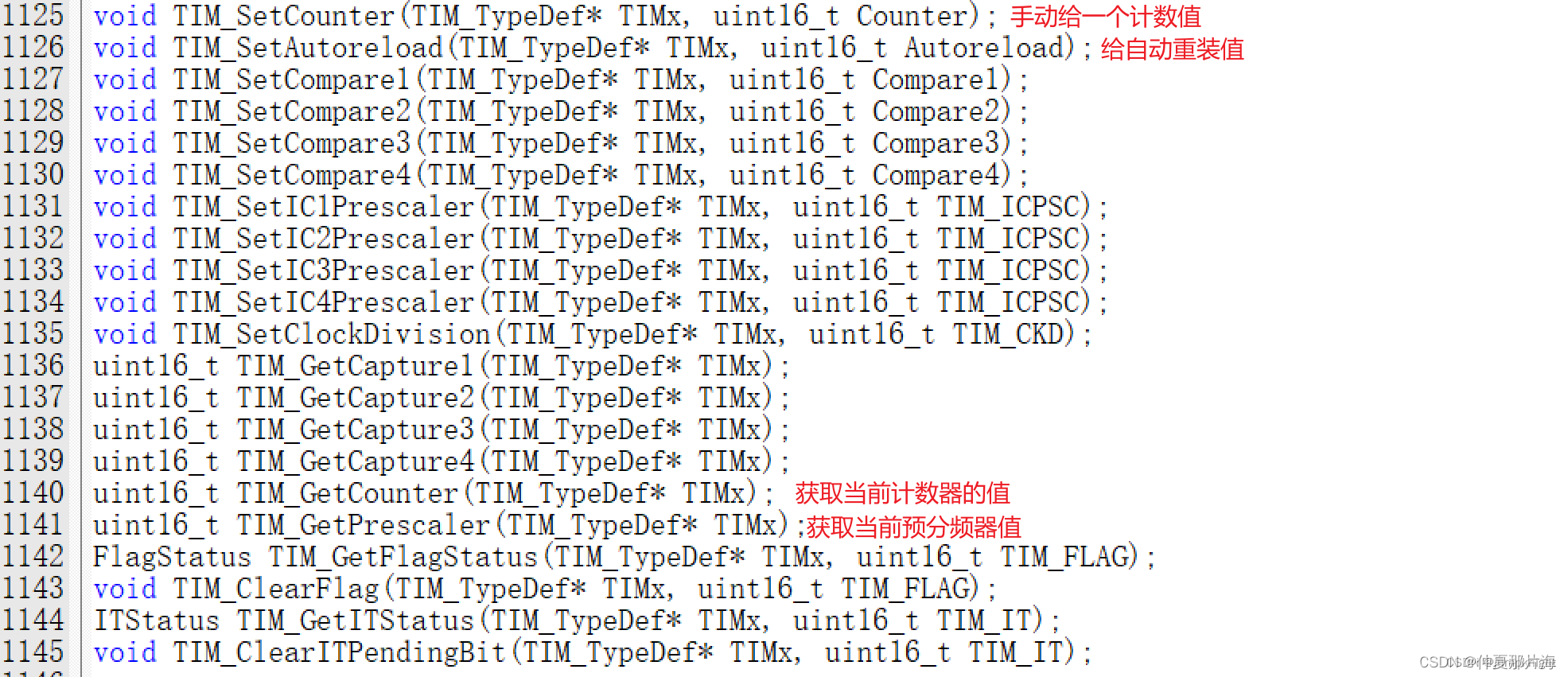
函数说明

这篇关于TIM(Timer)简介的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








