本文主要是介绍嵌入式学习-uboot-lesson14-LCD相关,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
关于LCD的相关知识在这里就不再说了,下面就直接开始对LCD进行编程分析。
一、硬件结构
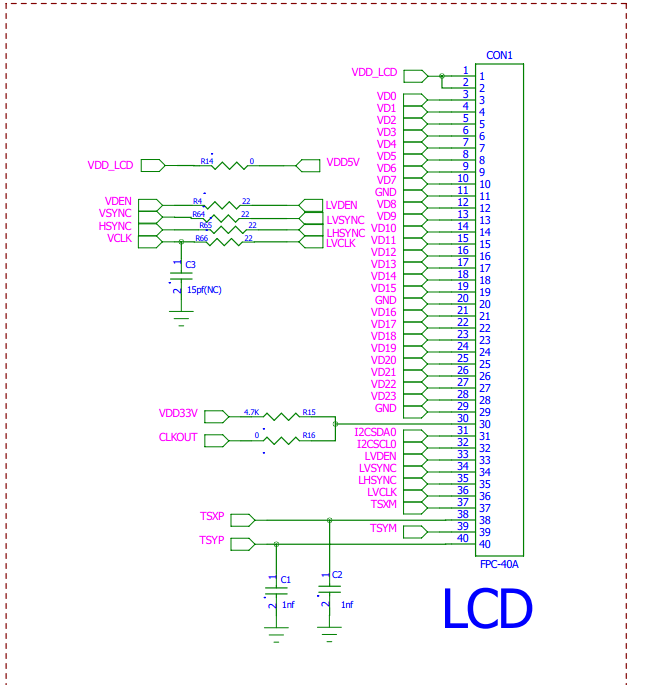
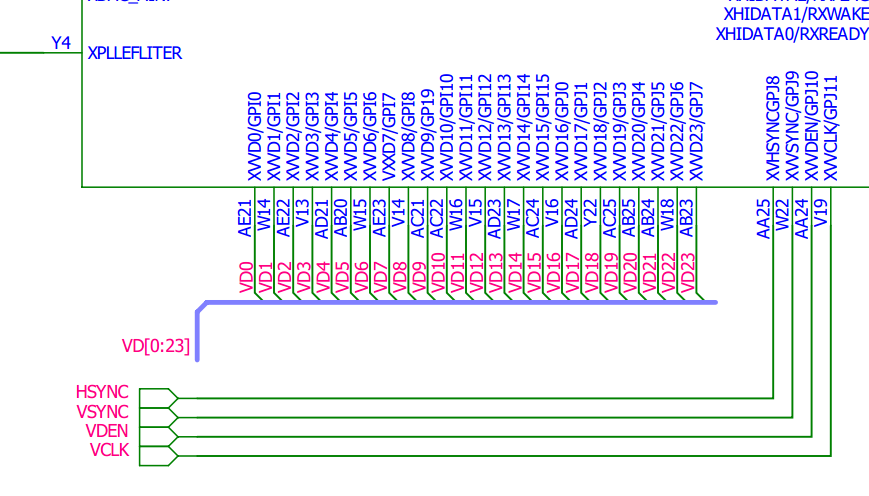
根据上面两幅图可以得知,
1.LCD的VD[0:23]一共24个引脚,接在GPI[0:15],GPJ[0:7] 这24个IO口上,
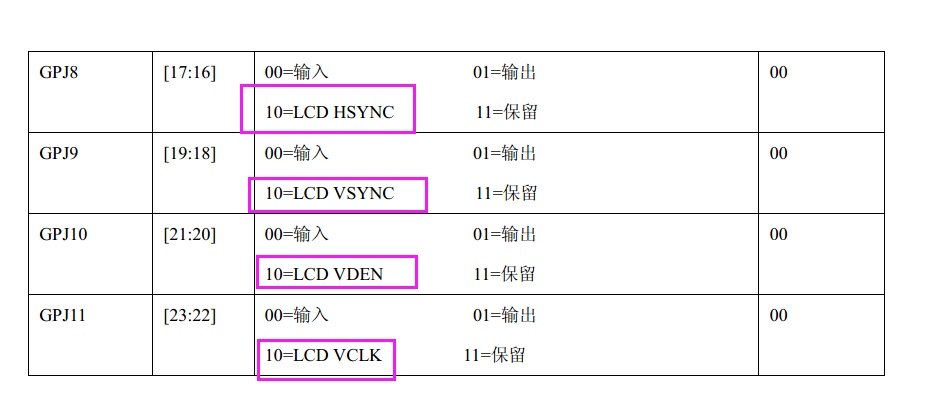
2.GPJ[8:11]分别接LCD的:
GPJ8—-HSYNC:行(水平方向)同步信号
GPJ9—-VSYNC:场(垂直方向)同步信号
GPJ10—VDEN:video data enable 视频输入使能端
GPJ11—VCLK :像素之间时钟信号
因此需要对这些引脚进行配置,使之满足我们的需求。
二、编程流程
根据第一步,我们首先需要做的工作是:
1).配置引脚
同时,我们还需要对LCD的时序进行配置
2).设置LCD时序值
同时,还需要对在内存中专门开辟出来的framebuffer,进行初始化
3).帧缓存初始化

第二步和第三步的全部过程在上面两幅图中全部标了出来,下面我们只需根据上面的步骤进行编程即可
三、编程实现
1).配置引脚
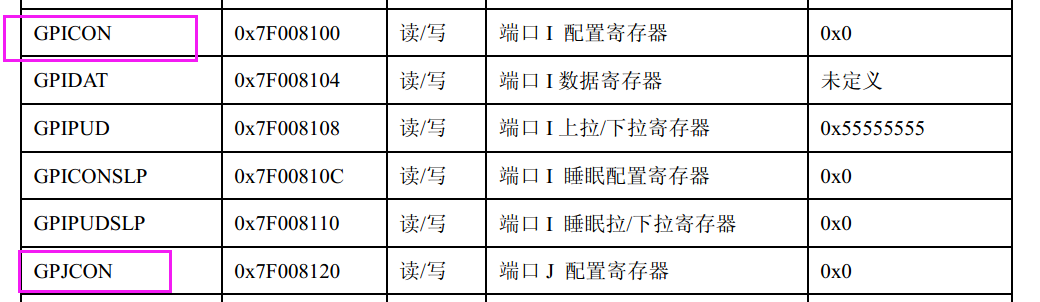
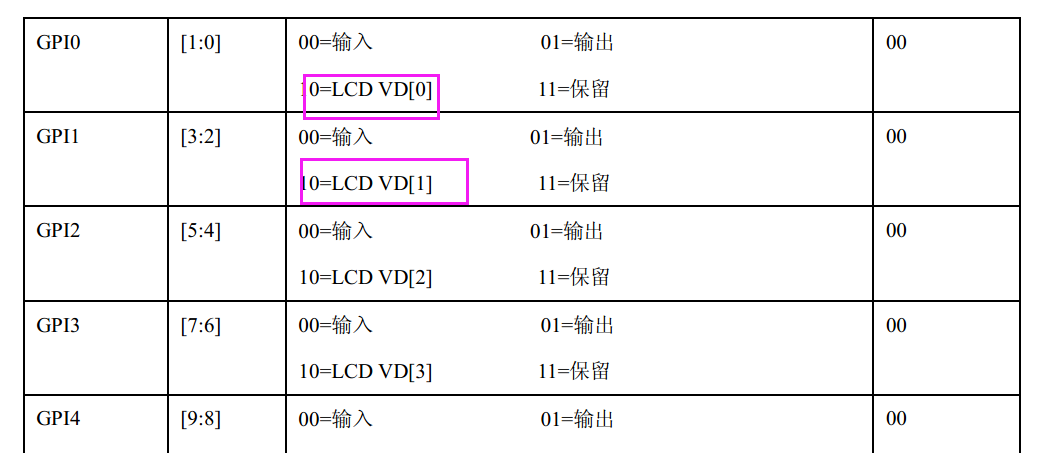
根据上图需要将GPI寄存器的所有引脚配置为0b10模式
即:
#define GPICON (*((volatile unsigned long*)0x7F008100)) //端口I 配置寄存器 GPICON = 0xaaaaaaaa; //16个引脚都配置为0b10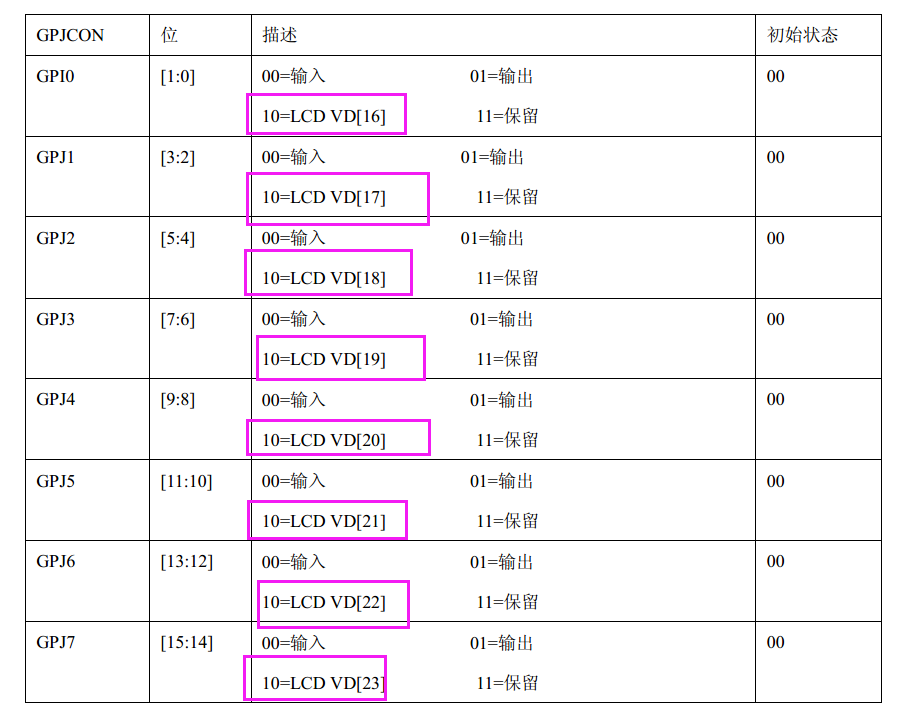
根据上面两幅图,可知需要将GPJ[0:15] 和GPJ[16:23]都设置为ob10
即:
#define GPJCON (*((volatile unsigned long*)0x7F008120)) //端口J 配置寄存器
GPJCON = 0xaaaaaa;2).设置LCD时序值和帧缓存初始化
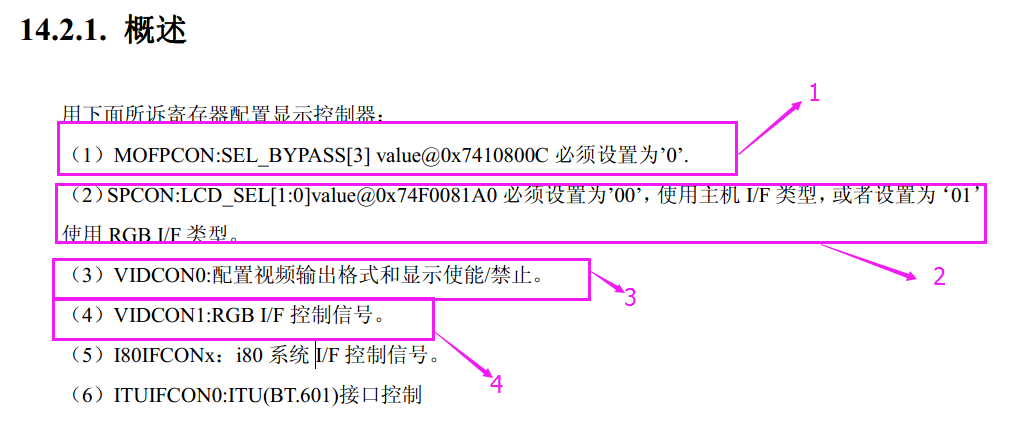
1.MIFPCON 的第三位SEL_BYPASS为0(正常模式)
根据前面的步骤流程图可知,需要将其第三位设为0即可

#define MOFPCON (*((volatile unsigned long*)0x7410800C)) //调制解调器接口控制寄存器
MOFPCON = 0<<3;2.SPCON的LCD_SEL[1:0]位设置为01,表示使用 RGB I/F 类型
根据上面的步骤流程图,需要将SPCON的[1:0]位设置为0b01即可


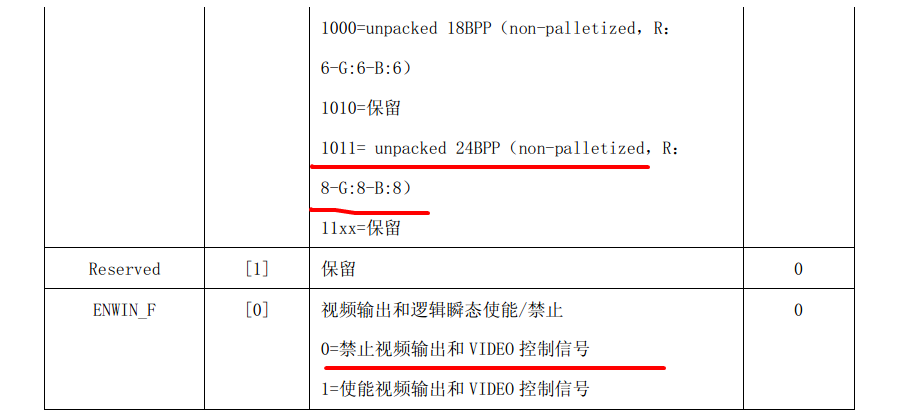
#define SPCON (*((volatile unsigned long*)0x7F0081A0)) //特殊端口控制寄存器 SPCON &= ~(0x3);SPCON |= 0x01;3.VIDCON0:配置视频输出格式和显示使能/禁止

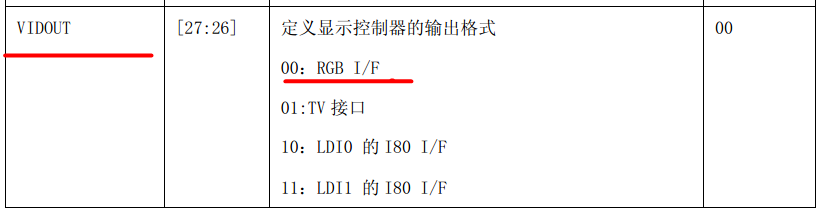
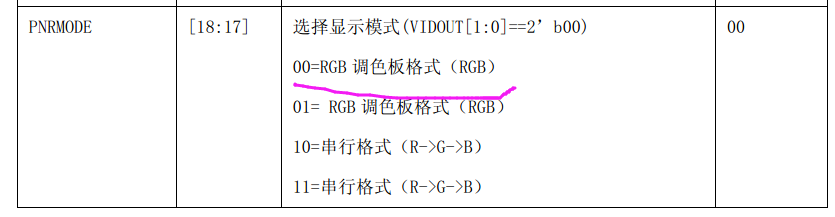


#define VIDCON0 (*((volatile unsigned long*)0x77100000)) //视频控制0 寄存器
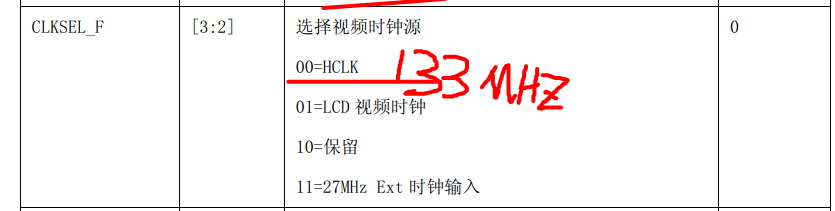
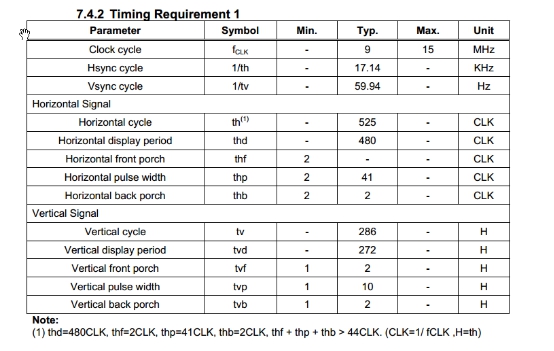
VIDCON0 &= ~((0x3<<26)| (0x3<<17) | (0x1<<16) | (0x3<<2)|(0<<5));其中时钟源选择HCLK为133MHZ
VCLK=视频时钟源/(CLKVAL+1) 其中。根据4.3寸屏的手册,VCLK的典型值为9MHZ,经过计算,得CLKVAL大约等于14
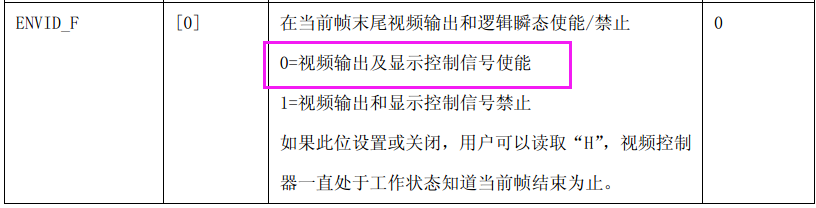


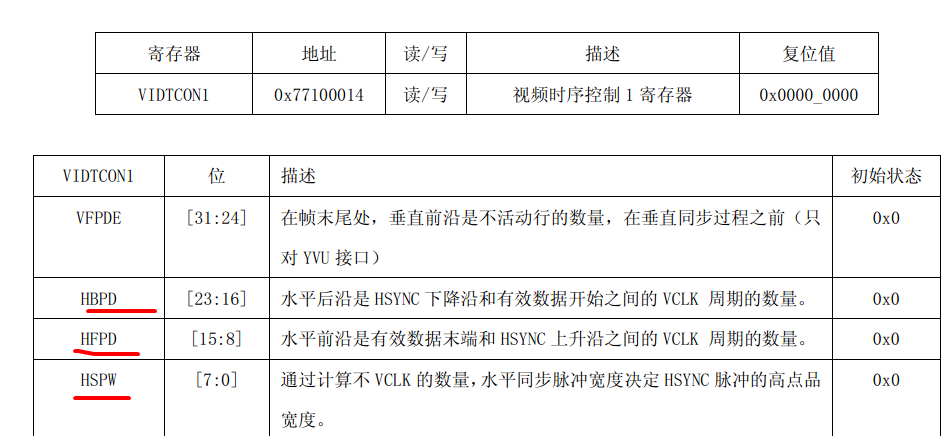
VIDCON0 |= ((14<<6) | (1<<4)|(3<<0));4VIDCON1 RGB控制信号
根据时序图,在VCLK的下降沿得到数据

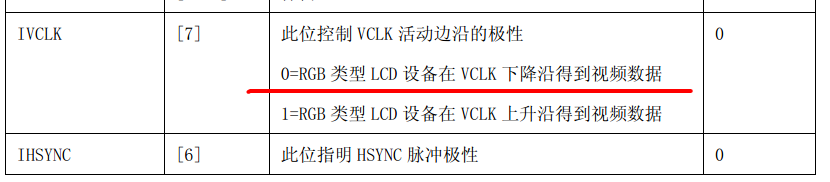

#define VIDCON1 (*((volatile unsigned long*)0x77100004)) //视频控制1 寄存器VIDCON1 &= ~(1<<7); VIDCON1 |= ((1<<6) | (1<<5)); 5VIDTCONx视频时序控制寄存器
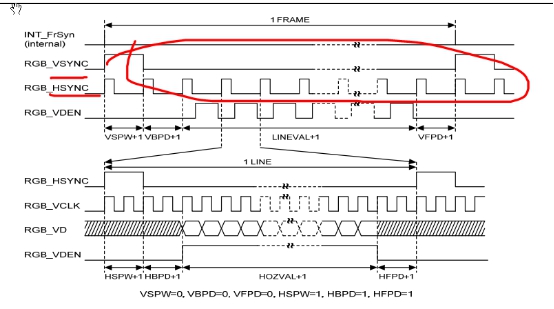
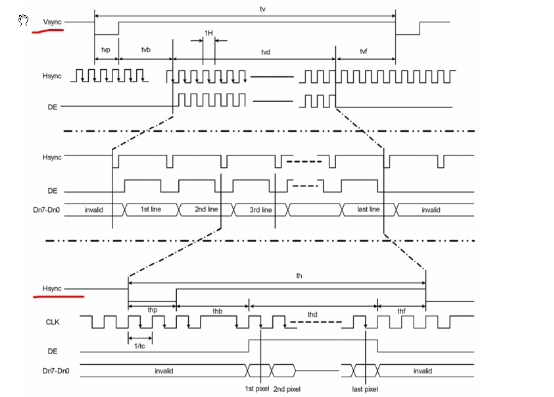
根据上面的几幅图,可以得出时序图:
5.1 VSPW
vspw+1=tvp=10 vspw=9
#define VSPW 95.2 VBPD
vbpd+1=tvb=2 vbpd=1
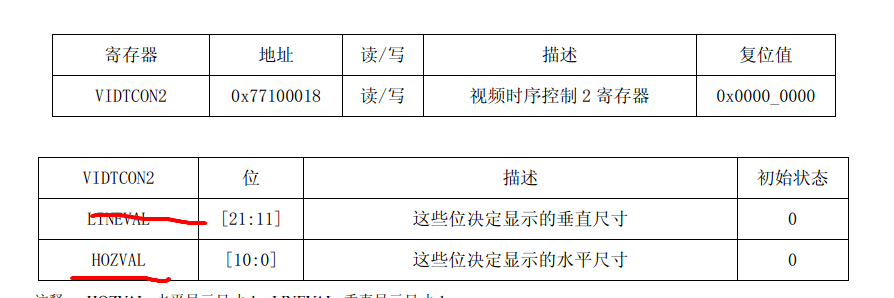
#define VBPD 15.3 LINEVAL
一共有272行,272-1=271
#define LINEVAL 272-15.4 VFPD
vfpd+1=tvf=2 vfpd=1
#define VFPD 15.5 HSPW
hspw+1=thp=41 hspw=40
#define HSPW 405.6 HBPD
hbpd+1=thb=2 hbpd=1
#define HBPD 15.7 HOZVAL
480-1=479
#define HOZVAL 480-15.8 HFPD
hfpd+1=thf=2 hfpd=1
#define HFPD 1综合上面,即:
#define VSPW 9
#define VBPD 1
#define LINEVAL 272-1
#define VFPD 1
#define HSPW 40
#define HBPD 1
#define HOZVAL 480-1
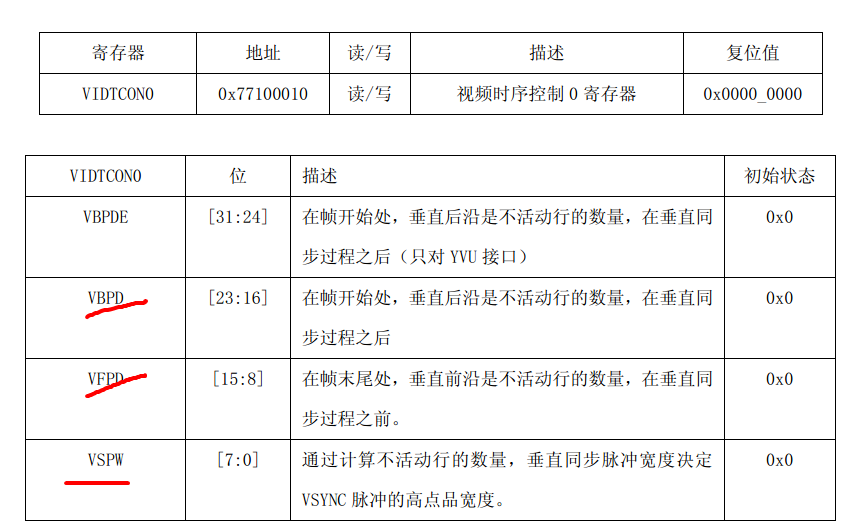
#define HFPD 1#define VIDTCON0 (*((volatile unsigned long*)0x77100010)) //视频时序控制0寄存器
#define VIDTCON1 (*((volatile unsigned long*)0x77100014)) //视频时序控制1寄存器
#define VIDTCON2 (*((volatile unsigned long*)0x77100018)) //视频时序控制2寄存器VIDTCON0 = (VBPD << 16) | (VFPD << 8) | (VSPW << 0);VIDTCON1 = (HBPD << 16) | (HFPD << 8) | (HSPW << 0);VIDTCON2 = (LINEVAL << 11) | (HOZVAL << 0);6WINCON0 窗口0控制寄存器

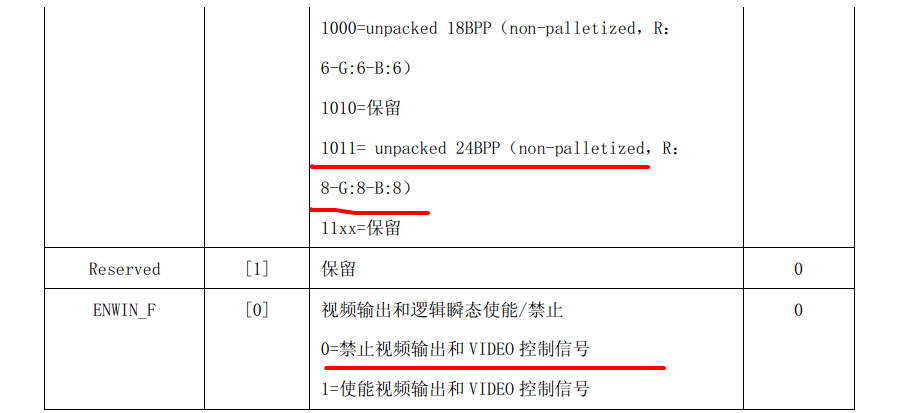
#define WINCON0 (*((volatile unsigned long*)0x77100020)) //窗口0 控制寄存器 WINCON0 &= ~(0xf << 2);WINCON0 |= (0xb<<2);WINCON0 = (1<<16)|(0xb<<2)|(1<<0);7

VIDOSD0A:窗口 0 位置控制 A 寄存器
左上角X,Y坐标
VIDOSD0B:窗口 0 位置控制 B 寄存器
右下角XY坐标
VIDOSD0C:窗口 0 位置控制 C 寄存器
行数列数(1个像素24位,但是占据32位,即4个字节)
同时,单位为word 所以为272*480
#define VIDOSD0A (*((volatile unsigned long*)0x77100040)) //视频窗口0 的位置控制寄存器
#define VIDOSD0B (*((volatile unsigned long*)0x77100044)) //视频窗口0 的位置控制寄存器
#define VIDOSD0C (*((volatile unsigned long*)0x77100048)) //视频窗口0 的位置控制寄存器
#define LeftTopX 0
#define LeftTopY 0
#define RightBotX 479
#define RigntBotY 271
VIDOSD0A = (LeftTopX<<11) |(LeftTopY<<0);VIDOSD0B = (RightBotX<<11)|(RigntBotY<<0);VIDOSD0C = (LINEVAL+1)*(HOZVAL+1);8
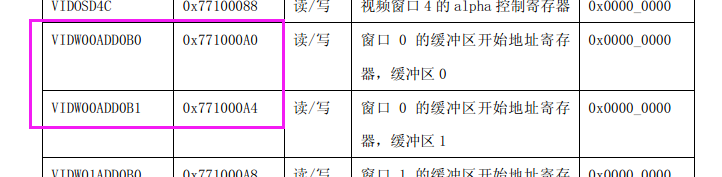
VIDW00ADD0B0 窗口 0 的缓冲区开始地址控制寄存器,缓冲区 0
存放FRAME_BUFFER的基地址
VIDW00ADD0B1 窗口 0 的缓冲区开始地址控制寄存器,缓冲区 1
VBASEL=VBASEU+(PAGEWIDTH+OFFSIZE)*(LINEVAL+1)=0+(480*4+0)*272
OFFSIZE:偏移值 从0开始
#define FRAME_BUFFER 0x54000000
#define VIDW00ADD0B0 (*((volatile unsigned long*)0x771000A0)) //窗口 0 的缓冲区开始地址控制寄存器,缓冲区 0
#define VIDW00ADD1B0 (*((volatile unsigned long*)0x771000D0)) //窗口 0 的缓冲区开始地址控制寄存器,缓冲区 1
VIDW00ADD0B0 = FRAME_BUFFER;
VIDW00ADD1B0 = (FRAME_BUFFER+((HOZVAL+1)*4+0)*(LINEVAL+1))&(0xffffff); 通过以上步骤即可实现了LCD的初始化,下面将对其进行测试,观察是否出现正确的图像。
四、测试
这次主要的测试是通过在显示屏上显示一副图片来完成的,
在显示图片之前,需要先将屏幕清一下(可不做)
void lcd_clear()
{int x,y,color;for(x=0;x<272;x++)for(y=0;y<480;y++)point(x,y,0xFFFfff); //WIN0MAP = (1<<24)|(color&0xffffff);
}然后可以在屏幕上进行划线,或者将某个区域填充为纯色,具体代码如下
//划横线 -> 描第201行,第y列for(y=100;y<380;y++)point(210,y,0xFF0000); 随后,便可以将图片显示在LCD上
//x0,y0,x(高度),y(宽度) 272*480
Paint_Bmp(0,0,272,480,bmp);void Paint_Bmp(U16 x0,U16 y0,U16 x,U16 y,const unsigned char gImage_bmp[])
{int i, j;unsigned char *p = (unsigned char *)gImage_bmp;int blue, green, red;int color;// 图片大小200x200像素for (i = x0 ; i < x0 +x; i++)for (j = y0; j < y0 + y; j++){blue = *p++;green = *p++;red = *p++;// D[23:16] = Red data, D[15:8] = Green data,D[7:0] = Blue datacolor = (red << 16)| (green << 8)|( blue << 0); point(i, j, color);}
}
贴上图片:
稍后
贴上主要代码:
/********************************************
*file name: lcd.c
*author : stone
*date : 2016.7.11
*function : lcd的初始化及测试
*********************************************/#define GPICON (*((volatile unsigned long*)0x7F008100)) //端口I 配置寄存器
#define GPJCON (*((volatile unsigned long*)0x7F008120)) //端口J 配置寄存器
#define MOFPCON (*((volatile unsigned long*)0x7410800C)) //调制解调器接口控制寄存器
#define SPCON (*((volatile unsigned long*)0x7F0081A0)) //特殊端口控制寄存器
#define VIDCON0 (*((volatile unsigned long*)0x77100000)) //视频控制0寄存器
#define VIDCON1 (*((volatile unsigned long*)0x77100004)) //视频控制1寄存器
#define VIDTCON0 (*((volatile unsigned long*)0x77100010)) //视频时序控制0寄存器
#define VIDTCON1 (*((volatile unsigned long*)0x77100014)) //视频时序控制1寄存器
#define VIDTCON2 (*((volatile unsigned long*)0x77100018)) //视频时序控制2寄存器
#define WINCON0 (*((volatile unsigned long*)0x77100020)) //窗口0 控制寄存器
#define VIDOSD0A (*((volatile unsigned long*)0x77100040)) //视频窗口0 的位置控制寄存器
#define VIDOSD0B (*((volatile unsigned long*)0x77100044)) //视频窗口0 的位置控制寄存器
#define VIDOSD0C (*((volatile unsigned long*)0x77100048)) //视频窗口0 的位置控制寄存器
#define VIDW00ADD0B0 (*((volatile unsigned long*)0x771000A0)) //窗口 0 的缓冲区开始地址控制寄存器,缓冲区 0
#define VIDW00ADD1B0 (*((volatile unsigned long*)0x771000D0)) //窗口 0 的缓冲区开始地址控制寄存器,缓冲区 1#define WIN0MAP (*((volatile unsigned long*)0x77100180))#define VSPW 9
#define VBPD 1
#define LINEVAL 272-1
#define VFPD 1
#define HSPW 40
#define HBPD 1
#define HOZVAL 480-1
#define HFPD 1#define LeftTopX 0
#define LeftTopY 0
#define RightBotX 479
#define RigntBotY 271#define FRAME_BUFFER 0x54000000
extern unsigned char bmp[391680];
typedef unsigned short U16;void lcd_port_init()
{GPICON = 0xaaaaaaaa; //16个引脚都配置为0b10GPJCON = 0xaaaaaa;
}void lcd_config_init()
{MOFPCON = 0<<3;SPCON &= ~(0x3);SPCON |= 0x01;VIDCON0 &= ~((0x3<<26)| (0x3<<17) | (0x1<<16) | (0x3<<2)|(0<<5));VIDCON0 |= ((14<<6) | (1<<4)|(3<<0));VIDCON1 &= ~(1<<7); VIDCON1 |= ((1<<6) | (1<<5)); VIDTCON0 = (VBPD << 16) | (VFPD << 8) | (VSPW << 0);VIDTCON1 = (HBPD << 16) | (HFPD << 8) | (HSPW << 0);VIDTCON2 = (LINEVAL << 11) | (HOZVAL << 0);WINCON0 &= ~(0xf << 2);WINCON0 |= (0xb<<2);WINCON0 = (1<<16)|(0xb<<2)|(1<<0);VIDOSD0A = (LeftTopX<<11) |(LeftTopY<<0);VIDOSD0B = (RightBotX<<11)|(RigntBotY<<0);VIDOSD0C = (LINEVAL+1)*(HOZVAL+1); VIDW00ADD0B0 = FRAME_BUFFER;VIDW00ADD1B0 = (FRAME_BUFFER+((HOZVAL+1)*4+0)*(LINEVAL+1))&(0xffffff);
}void point(int row, int col, int color)
{unsigned long *point = (unsigned long*)FRAME_BUFFER;*(point + row*480 + col) = color;
}void lcd_clear()
{int x,y,color;for(x=0;x<272;x++)for(y=0;y<480;y++)point(x,y,0xFFFfff); //WIN0MAP = (1<<24)|(color&0xffffff);}
void Paint_Bmp(U16 x0,U16 y0,U16 x,U16 y,const unsigned char gImage_bmp[])
{int i, j;unsigned char *p = (unsigned char *)gImage_bmp;int blue, green, red;int color;// 图片大小200x200像素for (i = x0 ; i < x0 +x; i++)for (j = y0; j < y0 + y; j++){blue = *p++;green = *p++;red = *p++;// D[23:16] = Red data, D[15:8] = Green data,D[7:0] = Blue datacolor = (red << 16)| (green << 8)|( blue << 0); point(i, j, color);}
}/*void Paint_txt(U16 x0,U16 y0,U16 x,U16 y,const unsigned char gImage_bmp[])
{int i, j;unsigned char *p = (unsigned char *)gImage_bmp;int blue, green, red;int color;// 图片大小200x200像素for (i = x0 ; i < x0 +x; i++)for (j = y0; j < y0 + y; j++){//blue = *p++;//green = *p++;//red = *p++;// D[23:16] = Red data, D[15:8] = Green data,D[7:0] = Blue data//color = (red << 16)| (green << 8)|( blue << 0); color = *p;point(i, j, color);}
}*/void lcd_init()
{lcd_port_init();lcd_config_init();
}void lcd_test()
{int y;lcd_clear();//划横线 -> 描第150行,第y列for(y=100;y<380;y++)point(210,y,0xFF0000); //x0,y0,x(高度),y(宽度) 272*480Paint_Bmp(0,0,272,480,bmp);//Paint_txt(0,0,224,56,zi);}菜鸟一枚,如有错误,多多指教。。。
这篇关于嵌入式学习-uboot-lesson14-LCD相关的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







