本文主要是介绍STM32F1之SPI通信·软件SPI代码编写,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

目录
1. 简介
2. 硬件电路
移位示意图
3. SPI时序基本单元
3.1 起始条件
3.2 终止条件
3.3 交换一个字节(模式0)
3.4 交换一个字节(模式1)
3.5 交换一个字节(模式2)
3.6 交换一个字节(模式3)
4. 代码编写
4.1 引脚初始化
4.2 引脚置高低电平封装
4.2.1 SPI写SS引脚电平
4.2.2 SPI写SCK引脚电平
4.2.3 SPI写MOSI引脚电平
4.2.4 I2C读MISO引脚电平
4.3 SPI起始
4.4 SPI终止
4.5 SPI交换传输一个字节
4.5.1 模式0
4.5.2 模式1
4.5.2 模式2
4.5.2 模式3
1. 简介
SPI(Serial Peripheral Interface)是由Motorola公司开发的一种通用数据总线。同步,全双工。支持总线挂载多设备(一主多从)。
四根通信线:SCK(Serial Clock)串行时钟线;
MOSI(Master Output Slave Input)主机输出从机输入;
MISO(Master Input Slave Output)主机输入从机输出;
SS(Slave Select)从机选择(若是有多个从机,有几个从机就有几条SS线,可见硬件电路中的连接图)。
2. 硬件电路
所有SPI设备的SCK、MOSI、MISO分别连在一起;
主机另外引出多条SS控制线,分别接到各从机的SS引脚;
输出引脚配置为推挽输出,输入引脚配置为浮空或上拉输入。

移位示意图
工作原理,假如主机想要发送一个字节给从机,从机也想发送一个字节给主机,开始,当SCK处于上升沿移位寄存器最左边数据移出,例如SPI主机中移位寄存器最左边“1”,移出到MOSI引脚上,而SPI从机的移位寄存器的最左边的数据“0”,移出到MISO引脚上,当SCK处于下降沿,MOSI上的数据进入到SPI从机的移位寄存器最右边,MISO上的数据进入到SPI主机的移位寄存器最右边。往复八次经过时钟的上升沿和下降沿,即可完成相互发送一个字节数据。

当多个从机输出连在一起,如果同时开启输出,会造成冲突,解决方法是,当SS未被选中的状态,从机的MISO引脚必须关断输出,即配置为高阻态。
3. SPI时序基本单元
3.1 起始条件
SS从高电平切换到低电平

3.2 终止条件
SS从低电平切换到高电平

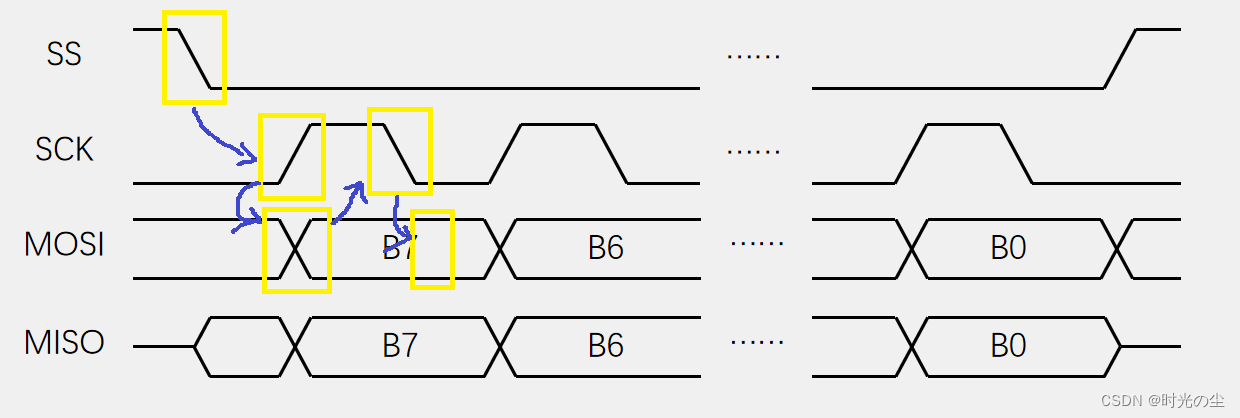
3.3 交换一个字节(模式0)
CPOL=0:空闲状态时,SCK为低电平
CPHA=0:SCK第一个边沿移入数据,第二个边沿移出数据

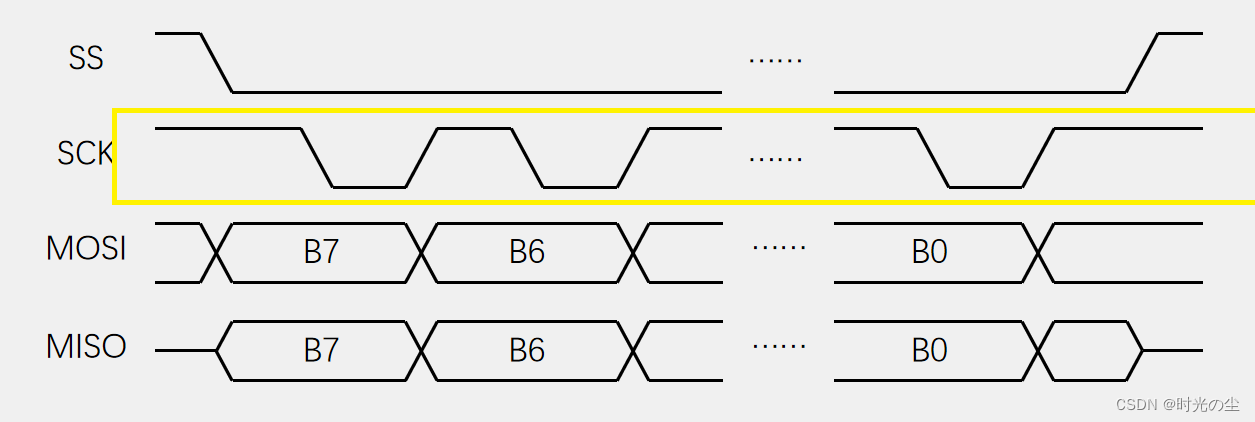
3.4 交换一个字节(模式1)
CPOL=0:空闲状态时,SCK为低电平
CPHA=1:SCK第一个边沿移出数据,第二个边沿移入数据

3.5 交换一个字节(模式2)
CPOL=1:空闲状态时,SCK为高电平
CPHA=0:SCK第一个边沿移入数据,第二个边沿移出数据

3.6 交换一个字节(模式3)
CPOL=1:空闲状态时,SCK为高电平
CPHA=1:SCK第一个边沿移出数据,第二个边沿移入数据

4. 代码编写
4.1 引脚初始化
void MySPI_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA4、PA5和PA7引脚初始化为推挽输出GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6引脚初始化为上拉输入/*设置默认电平*/MySPI_W_SS(1); //SS默认高电平MySPI_W_SCK(0); //SCK默认低电平
}其中,MySPI_W_SS(1); 和 MySPI_W_SCK(0);为封装函数,可以参照下一条。
4.2 引脚置高低电平封装
为了后续代码的编写方便,我们可以将,初始化的引脚进行封装。
4.2.1 SPI写SS引脚电平
此函数需要用户实现内容,当BitValue为0时,需要置SS为低电平,当BitValue为1时,需要置SS为高电平。
void MySPI_W_SS(uint8_t BitValue)
{GPIO_WriteBit(GPIOA, GPIO_Pin_4, (BitAction)BitValue); //根据BitValue,设置SS引脚的电平
}4.2.2 SPI写SCK引脚电平
此函数需要用户实现内容,当BitValue为0时,需要置SCK为低电平,当BitValue为1时,需要置SCK为高电平。
void MySPI_W_SCK(uint8_t BitValue)
{GPIO_WriteBit(GPIOA, GPIO_Pin_5, (BitAction)BitValue); //根据BitValue,设置SCK引脚的电平
}
4.2.3 SPI写MOSI引脚电平
此函数需要用户实现内容,当BitValue为0时,需要置MOSI为低电平,当BitValue非0时,需要置MOSI为高电平。
void MySPI_W_MOSI(uint8_t BitValue)
{GPIO_WriteBit(GPIOA, GPIO_Pin_7, (BitAction)BitValue); //根据BitValue,设置MOSI引脚的电平,BitValue要实现非0即1的特性
}4.2.4 I2C读MISO引脚电平
此函数需要用户实现内容,当前MISO为低电平时,返回0,当前MISO为高电平时,返回1。
uint8_t MySPI_R_MISO(void)
{return GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_6); //读取MISO电平并返回
}也可以参考:
STM32F1之I2C通信·软件I2C代码编写-CSDN博客
进行其他方法也能实现同样功能。
4.3 SPI起始
根据3.1我们可以看出SPI起始只需要将SS拉低就可以开始时序。
void MySPI_Start(void)
{MySPI_W_SS(0); //拉低SS,开始时序
}4.4 SPI终止
同理,根据3.2我们可以看出SPI起始只需要将SS拉高就可以结束时序。
void MySPI_Stop(void)
{MySPI_W_SS(1); //拉高SS,终止时序
}4.5 SPI交换传输一个字节
4.5.1 模式0
这里需要注意一下,在SPI中对于硬件SPI来说,由于使用了硬件的移位寄存器电路,所以下图中黄色部分几乎是同时发生的,但是对于软件SPI来说程序执行需要一条一条执行,有一个先后顺序,因此我们可以将这里看成一个先后执行的逻辑:

因此我们可以将其传送一位数据的流程如下,先SS下降,再移出数据,在SCK上升沿,在移入数据,在SCK下降沿,再移出数据。

uint8_t MySPI_SwapByte(uint8_t ByteSend)
{uint8_t ByteReceive = 0x00; //定义接收的数据,并赋初值0x00,此处必须赋初值0x00,后面会用到MySPI_W_MOSI(ByteSend & 0x80); //使用掩码的方式取出ByteSend的指定一位数据并写入到MOSI线MySPI_W_SCK(1); //拉高SCK,上升沿移出数据if (MySPI_R_MISO() == 1){ByteReceive |= 0x80;} //读取MISO数据,并存储到Byte变量//当MISO为1时,置变量指定位为1,当MISO为0时,不做处理,指定位为默认的初值0MySPI_W_SCK(0); //拉低SCK,下降沿移入数据MySPI_W_MOSI(ByteSend & 0x40); //使用掩码的方式取出ByteSend的指定一位数据并写入到MOSI线MySPI_W_SCK(1); //拉高SCK,上升沿移出数据if (MySPI_R_MISO() == 1){ByteReceive |= 0x40;} //读取MISO数据,并存储到Byte变量//当MISO为1时,置变量指定位为1,当MISO为0时,不做处理,指定位为默认的初值0MySPI_W_SCK(0); MySPI_W_MOSI(ByteSend & 0x20); //使用掩码的方式取出ByteSend的指定一位数据并写入到MOSI线MySPI_W_SCK(1); //拉高SCK,上升沿移出数据if (MySPI_R_MISO() == 1){ByteReceive |= 0x20;} //读取MISO数据,并存储到Byte变量//当MISO为1时,置变量指定位为1,当MISO为0时,不做处理,指定位为默认的初值0MySPI_W_SCK(0); MySPI_W_MOSI(ByteSend & 0x10); //使用掩码的方式取出ByteSend的指定一位数据并写入到MOSI线MySPI_W_SCK(1); //拉高SCK,上升沿移出数据if (MySPI_R_MISO() == 1){ByteReceive |= 0x10;} //读取MISO数据,并存储到Byte变量//当MISO为1时,置变量指定位为1,当MISO为0时,不做处理,指定位为默认的初值0MySPI_W_SCK(0); MySPI_W_MOSI(ByteSend & 0x08); //使用掩码的方式取出ByteSend的指定一位数据并写入到MOSI线MySPI_W_SCK(1); //拉高SCK,上升沿移出数据if (MySPI_R_MISO() == 1){ByteReceive |= 0x08;} //读取MISO数据,并存储到Byte变量//当MISO为1时,置变量指定位为1,当MISO为0时,不做处理,指定位为默认的初值0MySPI_W_SCK(0); //......一直移出到第八位return ByteReceive; //返回接收到的一个字节数据
}以上代码太过冗余,我们可以使用for循环来进行实现:
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{uint8_t i, ByteReceive = 0x00; //定义接收的数据,并赋初值0x00,此处必须赋初值0x00,后面会用到for (i = 0; i < 8; i ++) //循环8次,依次交换每一位数据{MySPI_W_MOSI(ByteSend & (0x80 >> i)); //使用掩码的方式取出ByteSend的指定一位数据并写入到MOSI线MySPI_W_SCK(1); //拉高SCK,上升沿移出数据if (MySPI_R_MISO() == 1){ByteReceive |= (0x80 >> i);} //读取MISO数据,并存储到Byte变量//当MISO为1时,置变量指定位为1,当MISO为0时,不做处理,指定位为默认的初值0MySPI_W_SCK(0); //拉低SCK,下降沿移入数据}return ByteReceive; //返回接收到的一个字节数据
}我们还可以根据“2.硬件电路”中的移位示意图中的数据进行操作,编写代码:
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{uint8_t i; for (i = 0; i < 8; i ++) //循环8次,依次交换每一位数据{MySPI_W_MOSI(ByteSend & 0x80);ByteSend <<=1;MySPI_W_SCK(1); //拉高SCK,上升沿移出数据if (MySPI_R_MISO() == 1){ByteReceive |= 0x01;}MySPI_W_SCK(0); //拉低SCK,下降沿移入数据}return ByteReceive; //返回接收到的一个字节数据
}这种方式相较于上一种代码效率更高,但是原始数据ByteSend会发生改变,因为这种方法是用移位数据本身进行操作的,效率跟高,但是原始数据ByteSend会在移位过程中发生改变,对于上一种方式编写的代码是还有掩码一次提取数据每一位,不会改变参数本身,两种方法皆可使用。
4.5.2 模式1
我们也可以将其传送一位数据的流程描述如下,先SS下降之后,在SCK上升沿,再移出数据,在SCK下降沿,在移入数据。
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{uint8_t i, ByteReceive = 0x00; //定义接收的数据,并赋初值0x00,此处必须赋初值0x00,后面会用到for (i = 0; i < 8; i ++) //循环8次,依次交换每一位数据{MySPI_W_SCK(1); MySPI_W_MOSI(ByteSend & (0x80 >> i)); //使用掩码的方式取出ByteSend的指定一位数据并写入到MOSI线MySPI_W_SCK(0); if (MySPI_R_MISO() == 1){ByteReceive |= (0x80 >> i);} //读取MISO数据,并存储到Byte变量//当MISO为1时,置变量指定位为1,当MISO为0时,不做处理,指定位为默认的初值0}return ByteReceive; //返回接收到的一个字节数据
}4.5.2 模式2
可以对比模式0,可以发现只是SCK极性相反,只需要将模式0的代码中出现SCK的地方“1”改为“0”,“0”改为“1”即可,将极性翻转一下。(注意初始化中的极性也要进行修改)
4.5.2 模式3

同理,可以对比模式1,可以发现只是SCK极性相反,只需要将模式0的代码中出现SCK的地方“1”改为“0”,“0”改为“1”即可,将极性翻转一下。(注意初始化中的极性也要进行修改)

这篇关于STM32F1之SPI通信·软件SPI代码编写的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






