arbotix专题
![ROS error: cannot launch node of type [arbotix_python/arbotix_driver]: arbotix_python](/front/images/it_default.jpg)
ROS error: cannot launch node of type [arbotix_python/arbotix_driver]: arbotix_python
Ubuntu18.04+ROS melodic运行xacro测试, ERROR: cannot launch node of type [arbotix_python/arbotix_driver]: arbotix_python ROS path [0]=/opt/ros/melodic/share/ros ROS path [1]=/home/mc/ros/mbot/src ROS path
ROS-arbotix安装
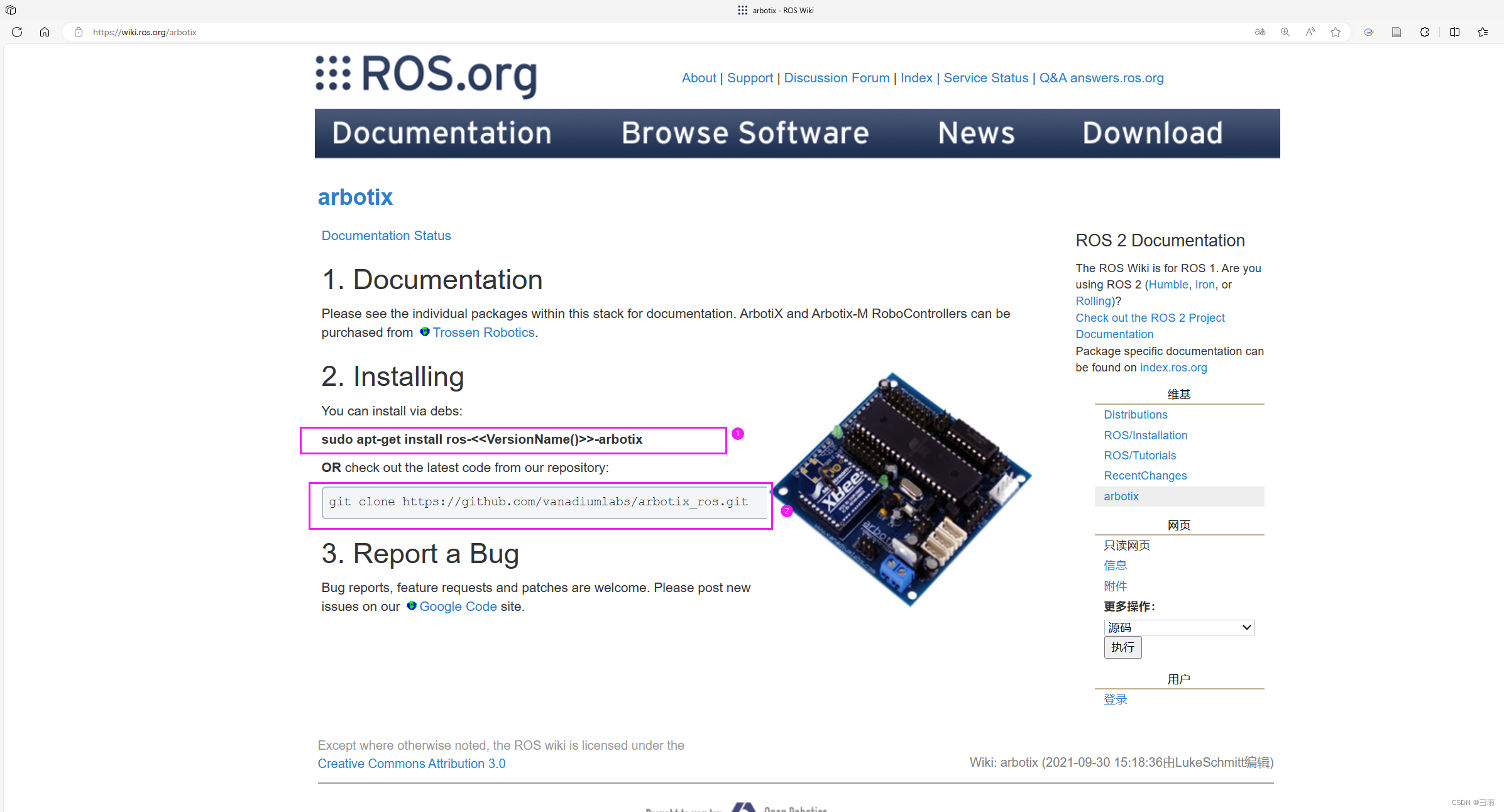
方式一:命令行输入: sudo apt-get install ros-melodic-arbotix 如果ROS为其他版本,可将melodic替换为对应版本。 方式二: 先从 github 下载源码,然后调用 catkin_make 编译 git clone https://github.com/vanadiumlabs/arbotix_ros.git
ROS自学笔记十七:Arbotix
ArbotiX 是一个基于 ROS(Robot Operating System)的机器人控制系统,它旨在为小型机器人提供硬件控制和传感器接口,以便于机器人的运动和感知。以下是有关 ROS 中 ArbotiX 的简介和安装步骤: ArbotiX 简介 ArbotiX 主要特点如下: 1. 支持小型机器人:ArbotiX 主要用于小型机器人,如轮式机器人、四足机器人和机械臂等。它提供了控制和通

ROS机器 (四) : arbotix控制器控制小车运动
一、简介 arbotix是一款控制电机、舵机的控制板,并提供了ROS功能包。他可以驱动真实的arbotix控制板,也可以在rviz中仿真。 简单的说,arbotix节点接受 /cmd_vel topic ,并驱动小车运动。 二、安装arbotix sudo apt-get install ros-kinetic-arbotix-* 三、urdf模型 请确保你有一个完整的urdf小

ROS入门(六)——仿真机器人二(Xacro+Rviz+Arbotix小车运动)
所用的学习链接: 【奥特学园】ROS机器人入门课程《ROS理论与实践》零基础教程P252-270 【以上视频笔记见http://www.autolabor.com.cn/book/ROSTutorials/】 前文参考ROS入门(五)——仿真机器人一(URDF+Rviz) 一、介绍 1.Xacro作用 Xacro 是 XML Macros 的缩写,Xacro 是一种 XML 宏语言,是