apriltag专题
Apriltag使用
Apriltag使用 开源项目:https://github.com/AprilRobotics/apriltag apriltag库是一个纯c的库,基本不依赖任何其他库。 Apriltag目前有版本2和版本3,版本3可兼容版本2.版本3的tag如下图: tag2如下: tag3是检测里面四个点,tag2是检测外面四个点。所以同样的大小的tag,tag2的位姿精度会更高。但tag3
apriltag使用之三:机械臂与Apriltag码对齐
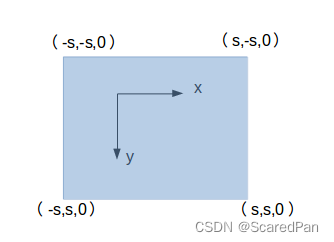
相机到Apriltag的对齐 上面是一个简单的手画的关于机器人、摄像头以及Apriltag码之间的位置关系图。机器人的基坐标系{s}由 ( x s , y s , z s , t s ) (\mathbf{x_s,y_s,z_s,t_s}) (xs,ys,zs,ts)表示,摄像头的初始位置的坐标系{c}由 ( x c , y c , z c , t c ) (\mathbf{x_c,
Apriltag使用之二:方位估计(定位)
Apriltag中计算的Homography 首先,在进行apriltag码检测时,如果检测到会一并计算出图像上apriltag码四个角点对应的homography矩阵,这个homography将这些点映射到到标准的(-1,1),(1,1),(1,-1),(-1,-1)顶点。在上面的示例一中,由homography和apriltag角点为: H = [ 3.3831e-01 7.066

Apriltag使用之一:python下的安装与检测
安装 在python中有几个实现的apriltag包。在windows下: pip install pupil-apriltags 在linux下: pip install apriltag 简单示例 示例一 这个例子中读取一个图像文件并进行检测 #!/usr/bin/env python# coding: UTF-8import apriltag#import pupi
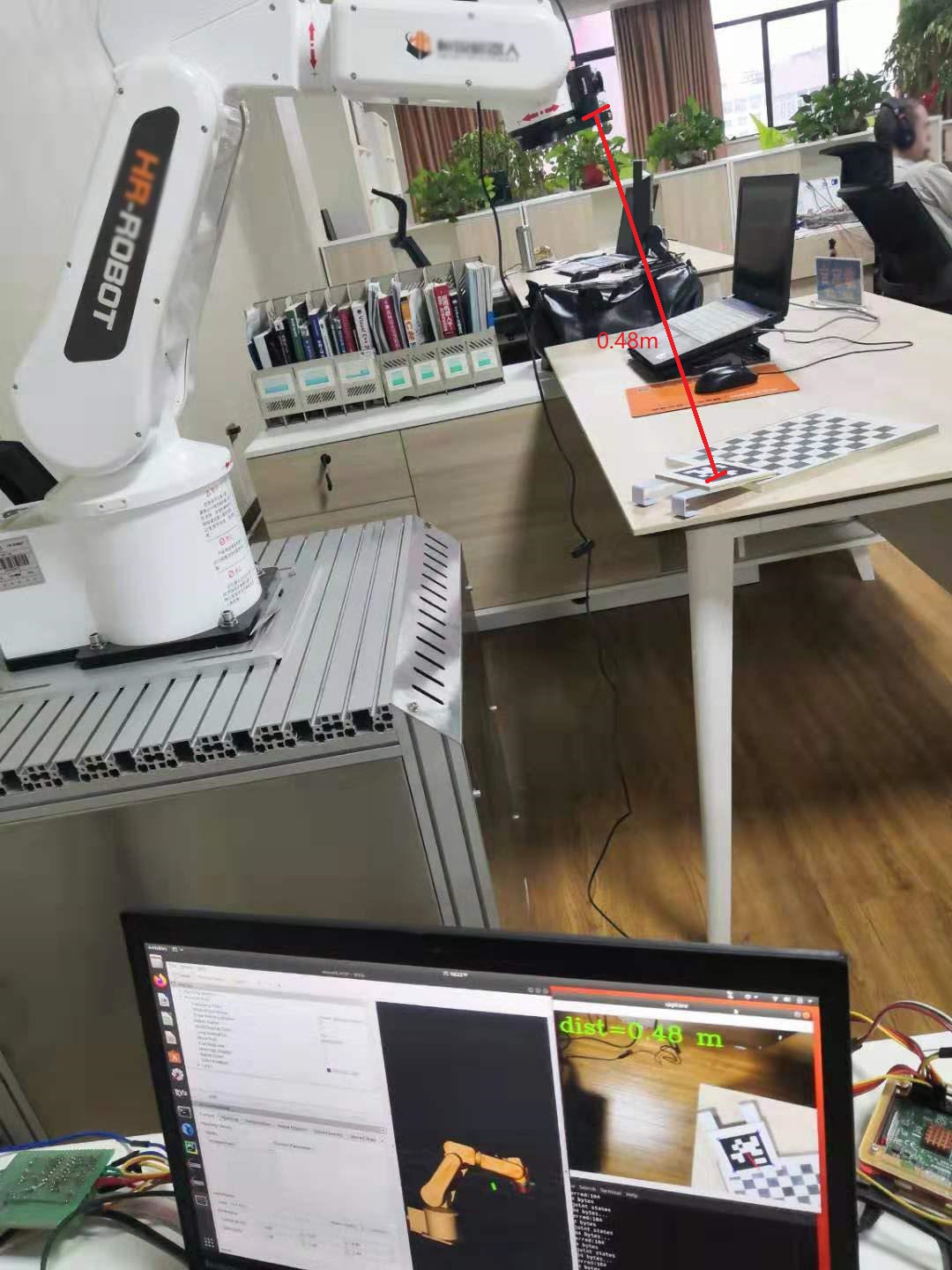
apriltag_ros +realsense_ros+ubuntu20.04
apriltag介绍: 实验平台:realsenseD435和apriltag码 官网:AprilTagThe APRIL Robotics Laboratory at the University of Michigan investigates Autonomy, Perception, Robotics, Interfaces, and Learning, and is part of
如何生成AprilTag的高清二维码图
我们从官网下载的AprilTag二维码图片分辨率非常低,根本无法打印使用,但是它里面附带有个alltags.ps的文件,这个是可以转换成pdf格式的高清图的。 我们先下载安装Ghostscript,安装完了之后我们把alltags.ps这个文件放到C:\Program Files (x86)\gs\gs9.20\lib(大概是这样,根据你具体安装目录),再到bin下面把gswin32c.exe也
Unity3d中使用Apriltag单目测距
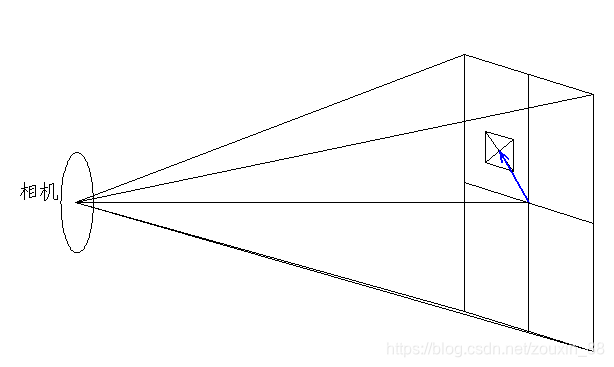
Hr为Apriltag码高度,单位CM Lr为Apriltag码到相机焦点的距离,单位CM Hv为Apriltag码在照片的高度,单位可为像素,在Unity中transform中的localScale值 Lv为相机的焦距 注意为了减小误差,Apriltag码应尽量位于相机的中轴线上,Apriltag码应与相机中轴线垂直。 第一步,求相机焦距 已知: Hr为4.65cm(用卷尺

Apriltag定位和识别
一、Apriltag定位和识别 - 知乎 (zhihu.com) 二、计算机视觉基础——相机标定 - 知乎 (zhihu.com) 鱼眼镜头畸变校正请参考: 三、sFisheye Calibration Basics - MATLAB & Simulink (mathworks.com) V是只由单应矩阵决定的已知量,求解上述线性方程,就可以得到向量
Apriltag使用之二:方位估计(定位)
Apriltag中计算的Homography 首先,在进行apriltag码检测时,如果检测到会一并计算出图像上apriltag码四个角点对应的homography矩阵,这个homography将这些点映射到到标准的(-1,1),(1,1),(1,-1),(-1,-1)顶点。在上面的示例一中,由homography和apriltag角点为: H = [ 3.3831e-01 7.066
Apriltag使用之一:python下的安装与检测
安装 在python中有几个实现的apriltag包。在windows下: pip install pupil-apriltags 在linux下: pip install apriltag 简单示例 示例一 这个例子中读取一个图像文件并进行检测 #!/usr/bin/env python# coding: UTF-8import apriltag#import pupi
apriltag使用之三:机械臂与Apriltag码对齐
相机到Apriltag的对齐 上面是一个简单的手画的关于机器人、摄像头以及Apriltag码之间的位置关系图。机器人的基坐标系{s}由 ( x s , y s , z s , t s ) (\mathbf{x_s,y_s,z_s,t_s}) (xs,ys,zs,ts)表示,摄像头的初始位置的坐标系{c}由 ( x c , y c , z c , t c ) (\mathbf{x_c,

通过openmv生成apriltag标签
Apriltag官网提供的tag图片分辨率很低,完全无法使用,通过openmv生成apriltag标签。 生成方法如下: openmv IDE的下载与安装 openmv官方提供了各种版本的IDE,下载Ubuntu版本,得到一个.run文件。 下载链接 下载完成后执行如下命令完成安装: #给openmv-ide-linux-x86_64-2.6.8.run权限 sudo chmod +x o

求助!ROS Apriltag 坐标变换 姿位输出
各位大神们好,我是机器人领域新手。最近在尝试用Apriltag来进行然后进行跟随。我机器人跟随的时候是用所识别的标签x,y两个坐标轴进行计算。但是在所识别出的标签y轴垂直于标签平面,这样的话计算结果不太正确。 想请问各位大神,标签位置坐标不对的原因。我按照教程在ROS里成功运行了apriltag包得出如果结果: 上面的my-bundle红色轴方向垂直于标签。但是网上的结果相机的z轴和标签的z轴是