1200plc专题

S7-1200PLC控制V90伺服通过FB284实现位置控制的方法
S7-1200PLC控制V90伺服通过FB284实现位置控制的方法 通过西门子报文111和FB284功能块 在V-ASSISTANT中将V90 PN设置控制模式为"基本位置控制(EPOS)" V90 PN与PLC采用PROFINET RT通信方式并使用西门子报文111。 在博途中V90 PN的设备视图中更改报文为:报文111 安装博图FB284库文件,若有需要可从以下链接获取:
博图V17新建项目测试软件实现S7-1200PLC软件常开常闭仿真
文章目录 @[TOC](文章目录) 博图V17新建项目 前言一、添加设备二、设置安全级别三、编写程序四、程序仿真五、程序下载六、运行效果总结 博图V17新建项目 前言 提示:这里可以添加本文要记录的大概内容: 项目需要: 提示:以下是本篇文章正文内容,下面案例可供参考 一、添加设备 选着1200cpu 选择4.0以上的版本 添加 二、设置安全级别 这里设置为安全
基于巨控GRM561/562/563Y西门子1200PLC发邮件
巨控GRM560,GRM600系列同比之前的GRM530,除短信,微信,电话语音播报增加了邮件发送功能,简单介绍一下PLC发邮件。 1在博途中建立好DB块 2.打开GRMDEV6,新建工程,做好数据采集,这里以DB4.D0(浮点数举例) 3.建立条件报警,也支持界限报警,报警条件,报警内容,发送目标 4.修改博途DB块DB4.D0数据
博途1200PLC高速脉冲输入(编码器速度信号采集和滤波处理)
速度估算有M法和T法测速2种常用方法,工业控制PLC上基本采用M法测速,M法测速的详细原理,这里不再赘述。感兴趣的可以参看下面的文章链接: PLC通过编码器反馈值计算速度的推荐做法(算法解析+ST代码)_RXXW_Dor的博客-CSDN博客PLC如何测量采集编码器的位置数据,不清楚的可以参看我的另一篇博文:三菱FX3U PLC高速计数器应用(附代码)_RXXW_Dor的博客-CSDN博客本文主要

S7-1200PLC与昆仑通态触摸屏通讯
测试环境:Win10、MCGS、博图V16、1214DCDCDC 博途工控人平时在哪里技术交流博途工控人社群 博途工控人平时在哪里技术交流博途工控人社群 将PLC端做如下配置 1-MCGS配置S7-1200驱动 1.1-添加驱动 双击设备窗口 点击设备组态窗口下的设备管理,选择西门子-->1200以太网,点击增加 双击增加的1200驱动,将其
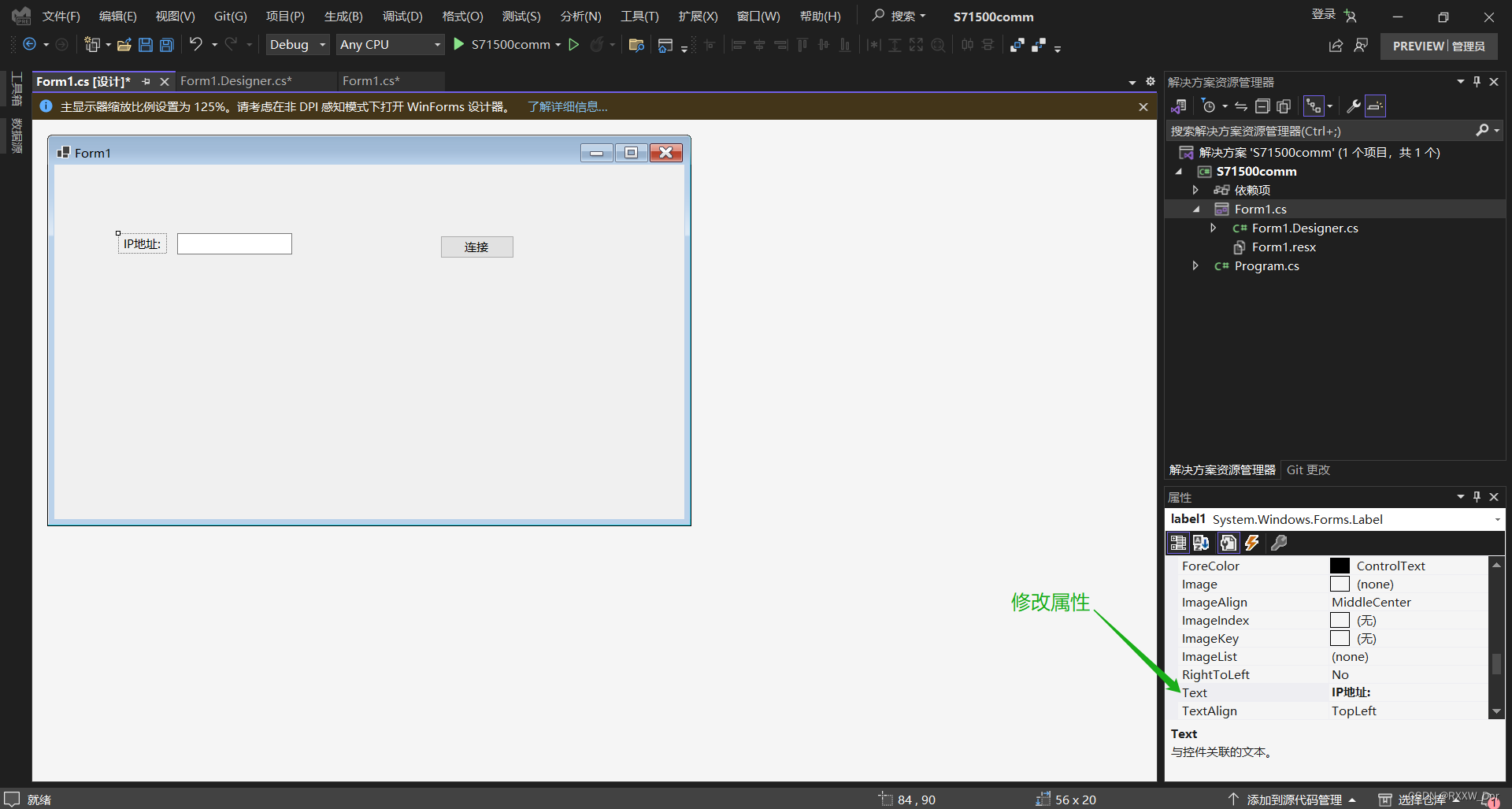
一步步建立一个C#项目(连续读取S7-1200PLC数据)
这篇博客作为C#的基础系列,和大家分享如何一步步建立一个C#项目完成对S7-1200PLC数据的连续读取。首先创建一个窗体应用。 1、窗体应用 2、配置存储位置 3、选择框架 拖拽一个Button,可以选择视图菜单---工具箱 4、工具箱 拖拽Lable控件和TextBook控件 5、拖拽控件 接下来右键解决方案,点击管理NuGet程序包 6、NuGet程序包
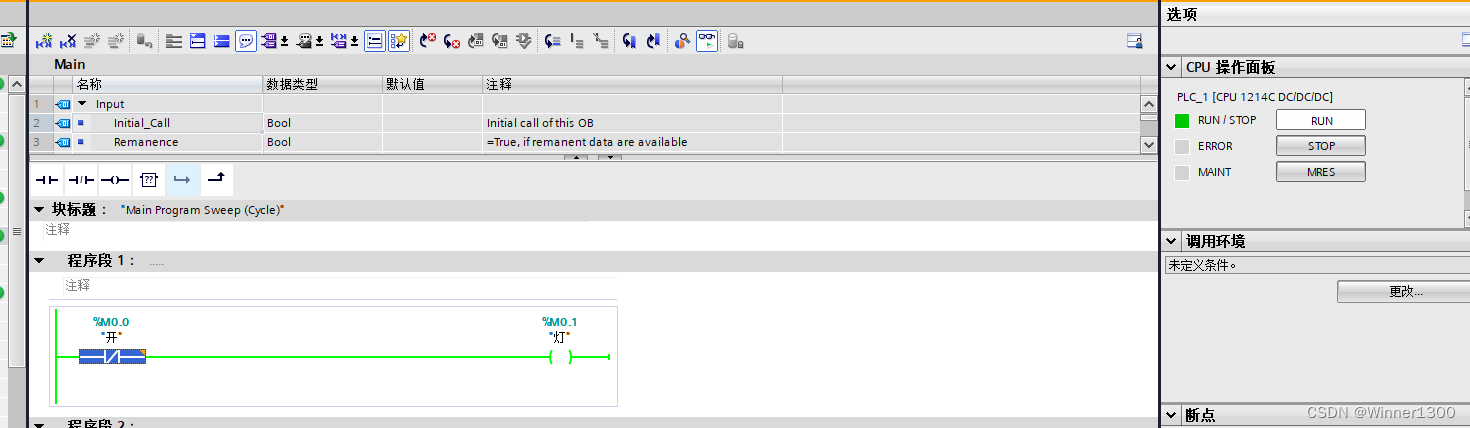
S7-1200PLC期末复习题(大题)
一、试用经验设计法设计满足下图设计的梯形图。 二、利用一个接通延时定时器控制灯点亮10s后熄灭,画出梯形图 三、设计一个闪烁电路,要求Q0.0为ON的时间为5s,Q0.0为OFF的时间为3s,画出梯形图。 四、按下启动按钮I0.0,Q0.5控制的电机运行30s,然后自动断电,同时Q0.6控制的制动电磁铁开始通电,10s后自动断电。设计梯形图。 五、 六、用三种定时
S7-1200PLC期末复习题(第十章)
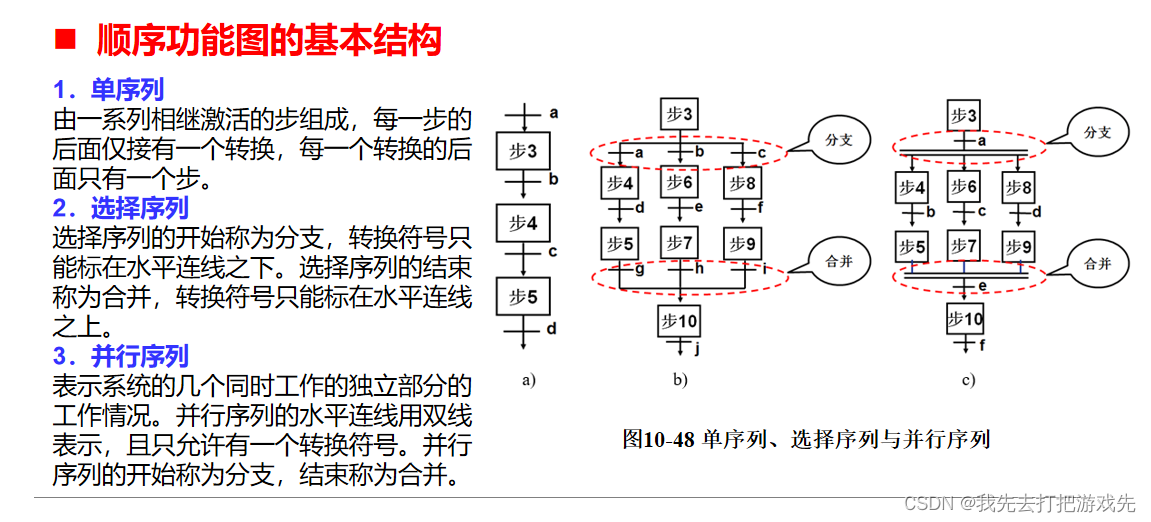
一、简述选择序列结构的执行过程。 答: 选择序列的开始称为分支,转换符号只能标在水平连线之下,选择序列的结束称为合并,转换符号只能标在连线之上。 二、简述转换实现的条件和转换实现时应完成的操作。 答: 1、 在顺序功能图中,步的活动状态的进展是由转换的实现来完成的。转换实现需满足前级步都是活动步,相应的条件得到满足。 2、转换实现时应完成的操作:使所有由有向连线与相应转换符号相连的
齿轮齿条运动相关计算(博途S7-1200PLC脉冲轴组态)
有关S7-1200PLC脉冲轴相关应用介绍请参考下面的系列文章: S7-1200PLC脉冲轴位置控制功能块 https://rxxw-control.blog.csdn.net/article/details/135299302https://rxxw-control.blog.csdn.net/article/details/135299302S7-1200脉冲轴功能块 https://r
S7-1200PLC期末复习题(第二章)
一、什么叫自锁、互锁?如何实现? 答: 1、依靠接触器自身辅助常开触点,使其线圈保持通电的作用叫做“自锁”。实现方式是将接触器自身的辅助常开触点与启动按钮并联。 2、互锁是当一个接触器工作时,另一个接触器不能工作。实现方式是利用两个接触器的常闭触点实现相互控制。 二、有两台三相笼型电动机M1和M2,M1(由KM1控制)启动后,M2方能启动;M1停车后,M2也停车,并且M2可单独停车。M2能

S7-1200PLC报警提示IO设备故障,但IO设备都正常的故障诊断及处理办法
S7-1200PLC报警提示IO设备故障,但IO设备都正常的故障诊断及处理办法 在现场可能会遇到这样的情况: 1200PLC的故障红灯一直在闪烁,但是通信仍然是正常的,这时我们打开博途软件,连接该PLC后,进入在线诊断,可以看到系统提示:模块存在。出错。LED(SF)故障。 如下图所示,进入诊断缓冲区后,可以看到系统提示:IO设备故障, 如下图所示,在设备视图中可以看到各个
1200PLC连接分布式IO组态编程应用
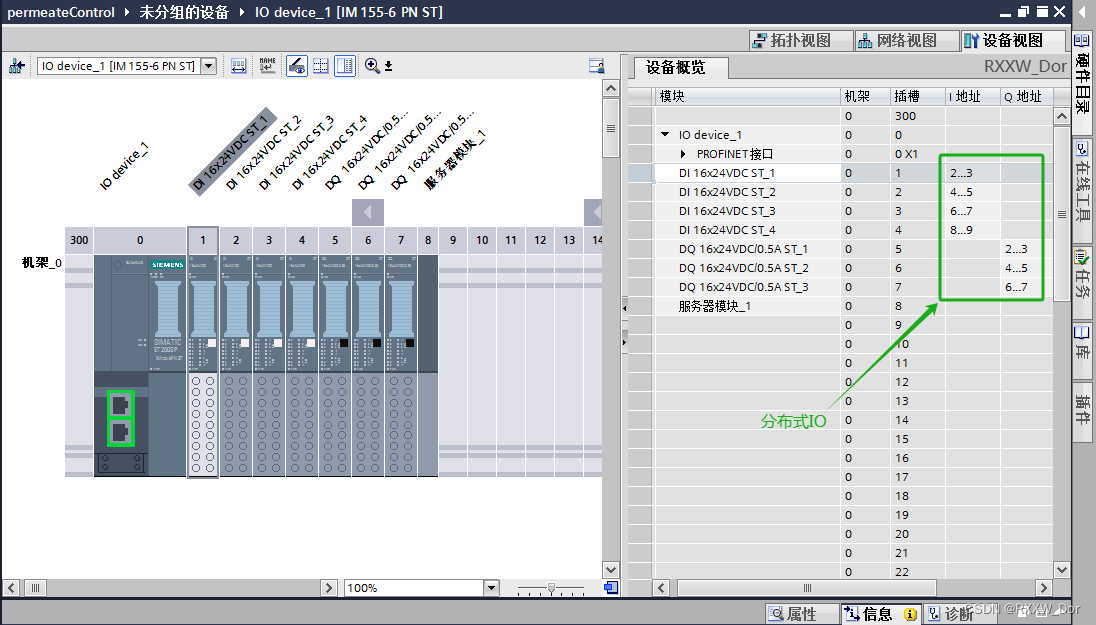
SMART PLC作为S7-1200PLC的智能IO从站设备组态和编程应用详细介绍请参考下面链接文章: https://rxxw-control.blog.csdn.net/article/details/130257474https://rxxw-control.blog.csdn.net/article/details/130257474这篇博客我们介绍S7-1200PLC和分布式IO连接
S7-1200PLC脉冲轴位置控制功能块(SCL代码)
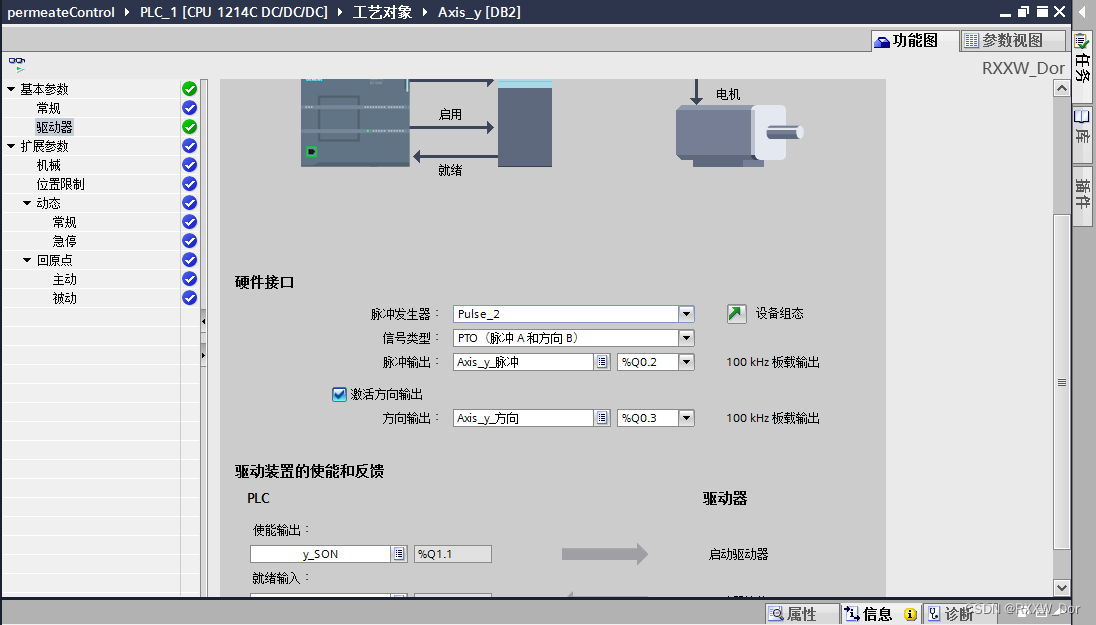
S7-1200PLC脉冲轴控制梯形图代码请参考下面链接文章: https://rxxw-control.blog.csdn.net/article/details/127920634https://rxxw-control.blog.csdn.net/article/details/127920634 1、脉冲轴配置 2、机械参数和硬限位设置 3、回原配置 4、轴2配置
MATLAB和S7-1200PLC水箱液位高度PID控制联合仿真(MODBUSTCP通信)
MATLAB和SMART 200PLC的联合仿真请查看下面文章链接 MATLAB Simulink和SMART PLC水箱液位高度PID控制(联合仿真)-CSDN博客文章浏览阅读606次。SMART PLC 向导PID的详细介绍请查看下面文章链接:S7-200 SMART PLC PID向导详细介绍(如何实现P、PD、PID控制器)-CSDN博客文章浏览阅读1k次。这篇博客主要介绍SMART P
S7-1200PLC硬件上升沿中断(VN积分法计算实时卷径)
VN积分法计算实时卷径的算法原理请参考下面文章链接: VN积分法卷径计算FB(SCL代码)_RXXW_Dor的博客-CSDN博客卷径计算的其他方法请参看专栏的相关文章,链接如下:卷径计算(V/N法)_RXXW_Dor的博客-CSDN博客。https://rxxw-control.blog.csdn.net/article/details/131612206PLC中断程序原理介绍 PLC定时中断
博途1200PLC轴控功能块(脉冲轴)
1200选择晶体管输出的型号,本体支持脉冲发送,利用工艺对象可以组态脉冲轴。利用1200和1500PN总线可以进行总线伺服的控制,具体请参看下面的博客: 博途1200/1500PLC V90 PN通信控制 (FB284功能块)_RXXW_Dor的博客-CSDN博客_fb284功能块先简单说下如何获取FB284,一般有2种方法,Startdrive软件可以操作大部分西门子的驱动器,建议安装调试方便
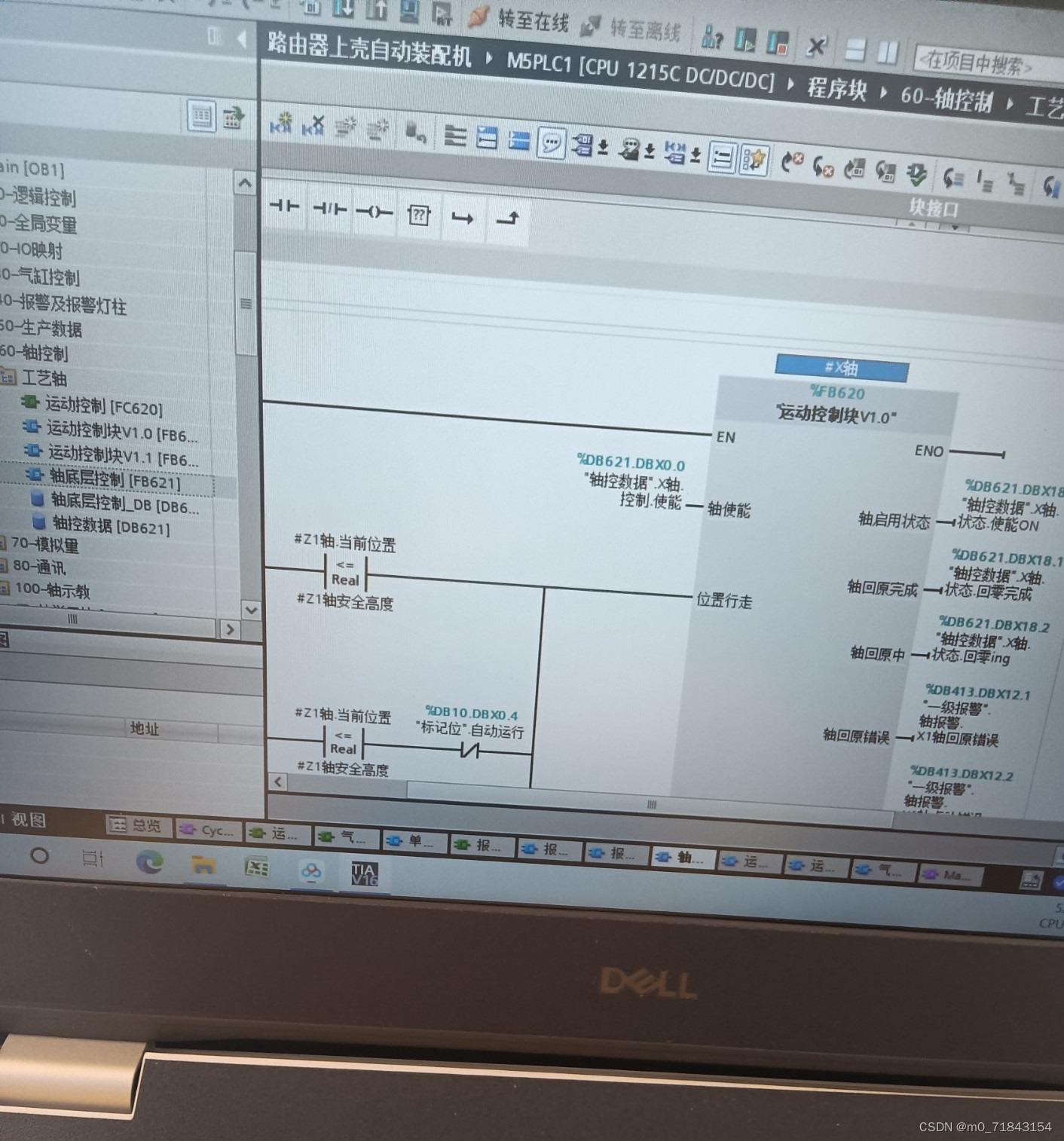
西门子1200plc轴运动控制程序,此程序是之前给海康威视做的一台装路由器壳子的机器
西门子1200plc轴运动控制程序,此程序是之前给海康威视做的一台装路由器壳子的机器,程序包括有调用轴控制块做的控制3个伺服,1个电缸,还有用PUT GET块与上下游plc通讯,轴控制块和气缸报警块都是自己写的,已经在很多个项目上成熟应用,可以直接调用,对于做西门子1200轴控制等有很好的学习借鉴意义 YID:4115673604931262
S7-1200PLC和SMART PLC开放式以太网通信(UDP双向通信)
S7-1200PLC的以太网通信UDP通信相关介绍还可以参考下面文章链接: 博途PLC开放式以太网通信TRCV_C指令应用编程(运动传感器UDP通信)-CSDN博客文章浏览阅读2.8k次。博途PLC开放式以太网通信TSENG_C指令应用,请参看下面的文章链接:博途PLC 1200/1500PLC开放式以太网通信TSEND_C通信(UDP)_plc的udp通信_RXXW_Dor的博客-CSDN博客
S7-1200PLC和SMART PLC开放式以太网通信(UDP双边通信)
S7-1200PLC的以太网通信UDP通信相关介绍还可以参考下面文章链接: 博途PLC开放式以太网通信TRCV_C指令应用编程(运动传感器UDP通信)-CSDN博客文章浏览阅读2.8k次。博途PLC开放式以太网通信TSENG_C指令应用,请参看下面的文章链接:博途PLC 1200/1500PLC开放式以太网通信TSEND_C通信(UDP)_plc的udp通信_RXXW_Dor的博客-CSDN博客
西门子1200PLC博途程序参考实例集合: 程序1具体程序为西门子1200气力输灰系统
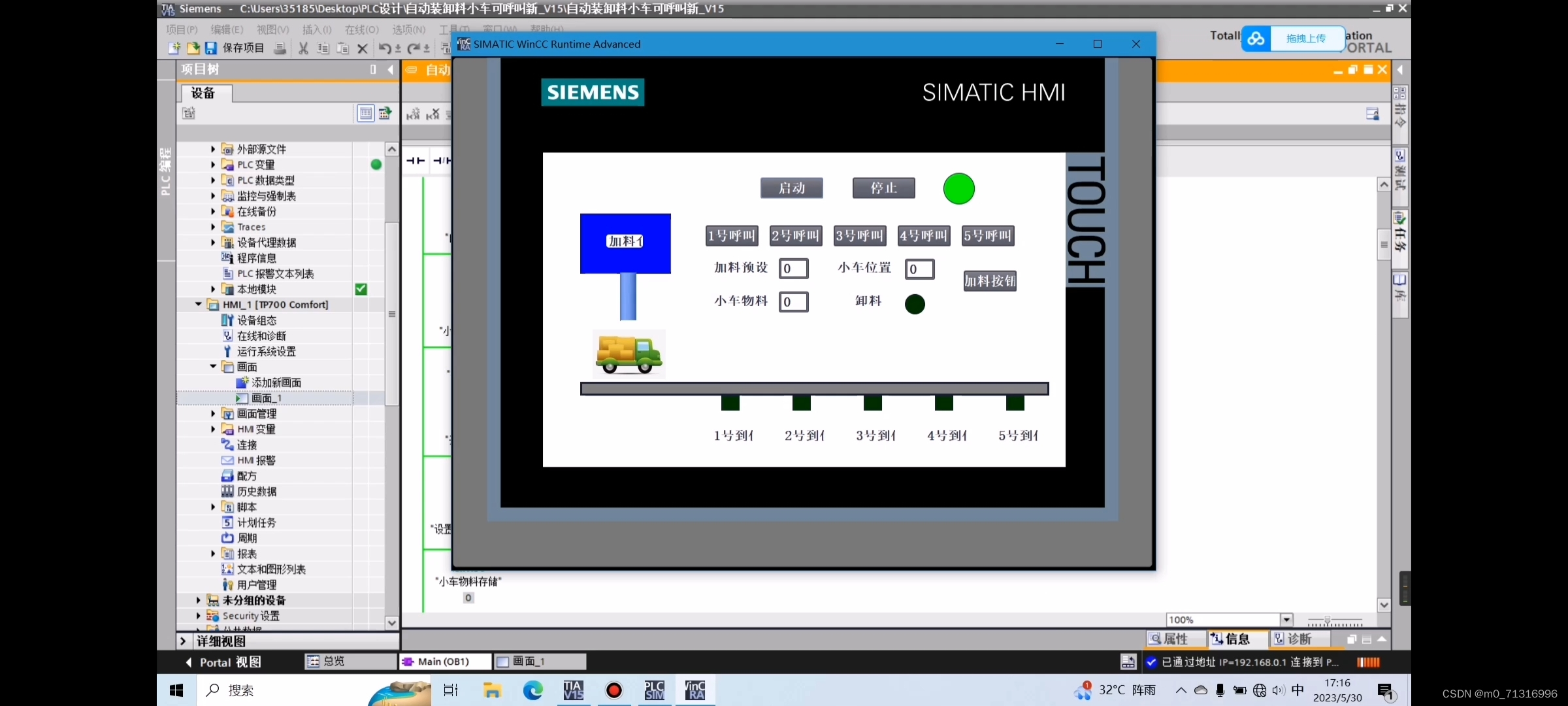
西门子1200PLC博途程序参考实例集合: 程序1具体程序为西门子1200气力输灰系统,具体为单排5个AV料泵输送系统。 包含程序及昆仑通泰触摸屏画面,D10 程序2为一种配料控制系统,采用1200控制器,有配方程序,变频通讯程序,触摸屏同样采用昆仑通泰。 ID:1320670060404347
Movicon/Connext设备连接实例(三)——Movicon.NExT与西门子1200PLC OPC UA通讯
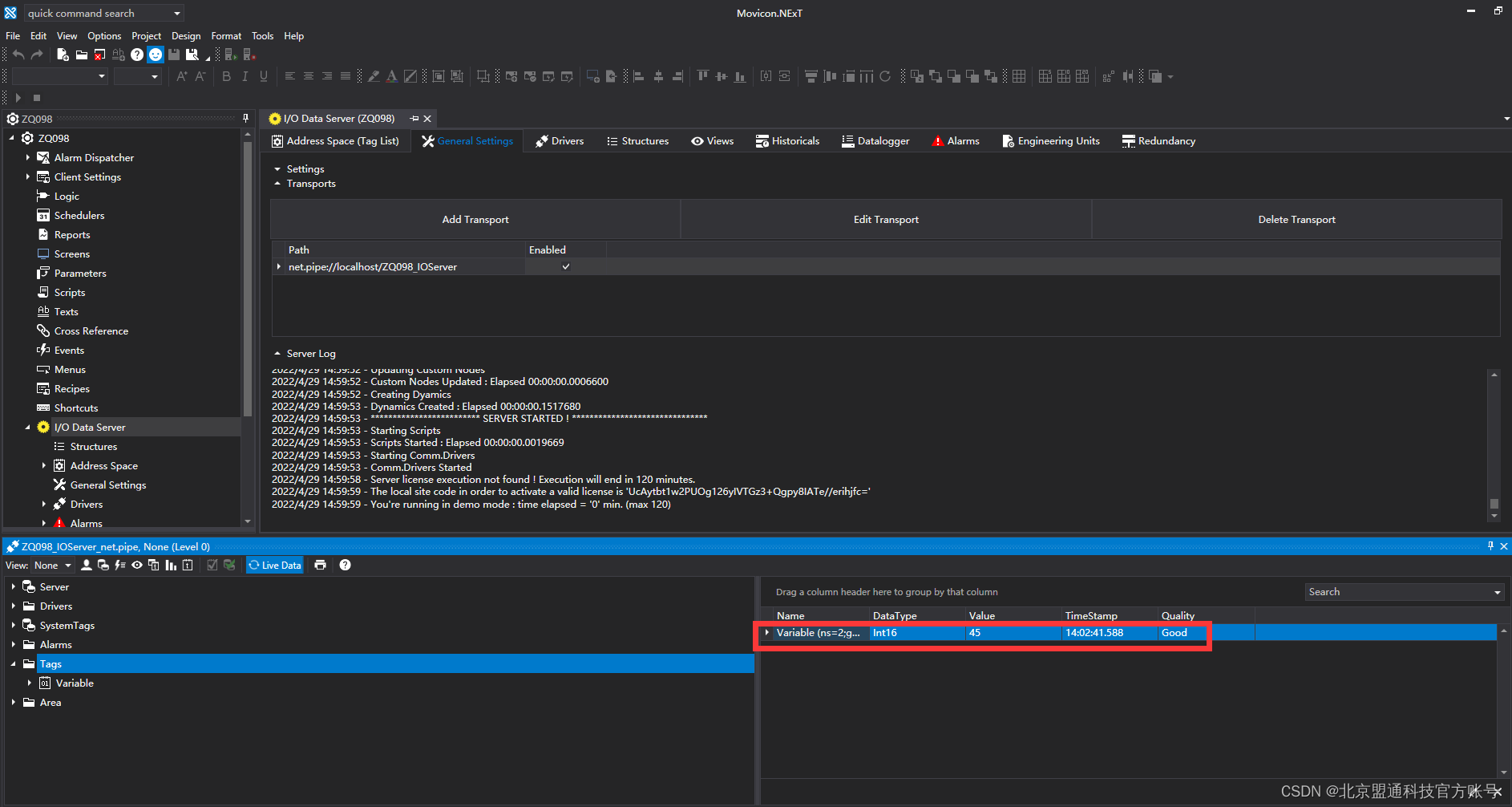
Movicon.Next是全新一代的HMI/SCADA解决方案,拥有众多超越传统的扩展功能。 Movicon平台有着广泛的应用场景,且在众多行业中继承了优秀的解决方案,得到了市场广泛认证。针对不同的行业都能对快速找出解决方案并快速部署,且整个过程不影响到原有的生产Movicon旗下有多款产品,可以从底层的应用数据到上层的云数据库进行互联,最终实现数字可视化。除此之外,实时的报警,历史趋势的分析,

西门子1200plc轴运动控制程序模板 介绍:此程序是之前给海康威视做的一台装路由器壳子的机器
西门子1200plc轴运动控制程序模板 介绍:此程序是之前给海康威视做的一台装路由器壳子的机器。 程序有以下: 1):调用轴控制块做的控制3个伺服, 2):1个电缸, 3):用PUT GET块与上下游plc通讯, 4):轴控制块 5):气缸报警块 6):完整的电路图 7):威纶通触摸屏程序 8):IO表 程序块已经在很多个项目上成熟应用,可以直接调用,对于做西门子1200轴控制等有很好的学习借鉴
西门子S7-1200PLC混合通信编程(ModbusTcp和UDP通信)
S7-1200PLC的MODBUS-TCP通信 西门子PLC ModbusTcp通信访问网关后从站(SCL语言轮询状态机)-CSDN博客文章浏览阅读305次。西门子PLC的ModbusTcp通信在专栏已有很多文章介绍,所不同的是每个项目的通信需求都略有不同,今天我们以访问网关后的三个从站数据来举例,给出轮询的推荐写法,这里我们利用SCL语音进行编程,方便大家导入导出到自己的项目里使用,相关文章链
ModbusTcp通信(S7-1200PLC作为服务器端)
S7-200Smart plc作为ModbusTcp服务器端的通信 S7-200SMART PLC ModbusTCP通信(ModbusTcp服务器)_s7-200 modbustcp-CSDN博客文章浏览阅读2.3k次。S7-200SMART PLC 作为ModbusTCP通信(客户端)编程应用和程序详细讲解可以查看下面的博客,链接地址如下:S7-200SMART PLC ModbusTCP通

Siemens 1200PLC与GF120变频器DP通讯故障 报F1910
硬件: 1200 PLC: CPU 1214C AC/DC/Rly DP通信模块:CM 1243-5 G120:CU240B-2 DP 问题描述: PLC通过DP通讯控制变频器,变频器驱动电机运行。而问题是电机不运行时通讯正常,电机一运行,变频器就报F1910通讯故障。 解决方式 尝试了很多方式,比如通信端子接地、检查终端电阻、通讯电缆屏蔽层接地等,但是发现以下方式效果显著。 降低通讯频